

Auxiliary motion device, driving system and control method
A motion device and driving device technology, applied in the fields of auxiliary motion devices, driving systems and control, can solve the problems of low motion accuracy, inability to use in nuclear magnetic environment, complex structure of motion devices, etc., and achieve the effect of increasing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
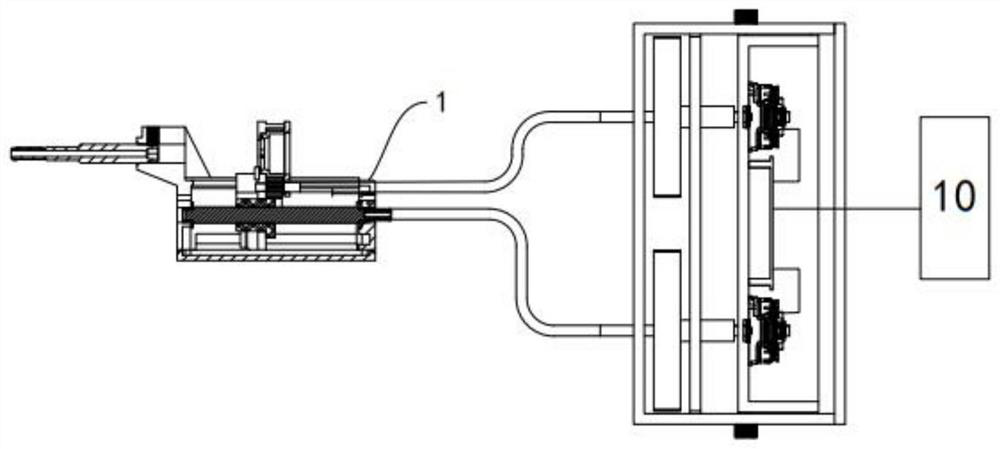
[0065] The present invention proposes an auxiliary movement device including a frame 1, a movement assembly and a drive assembly, the movement assembly and the drive assembly are provided separately, and there is a certain distance between the movement assembly and the drive assembly during actual use. The setting distance of the driving assembly is that the driving assembly is set away from the NMR main body or the magnetic resonance chamber. Firstly, the influence of the driving assembly on the magnetic resonance imaging and temperature measurement technology is avoided, and the second is to reduce the weight of the moving assembly, so that the moving assembly The volume and weight of the movement components are reduced to the minimum, so that the movement components can be fixedly connected with the skull nails without additional fixing devices; at the same time, the reduction of the weight of the movement components can increase its stability, so that it can be used during m...
Embodiment 2
[0076] see again Figure 2A to Figure 2C , Figure 3A to Figure 3B , Figure 4A to Figure 4B , Another specific embodiment 2 of the present invention differs from embodiment 1 in that, in order to make the movement of the rotary motion assembly 3 more stable and precise, the present embodiment 2 applies the linear motion assembly 2 and the rotary The cooperation mode between the motion components 3 has been further optimized.
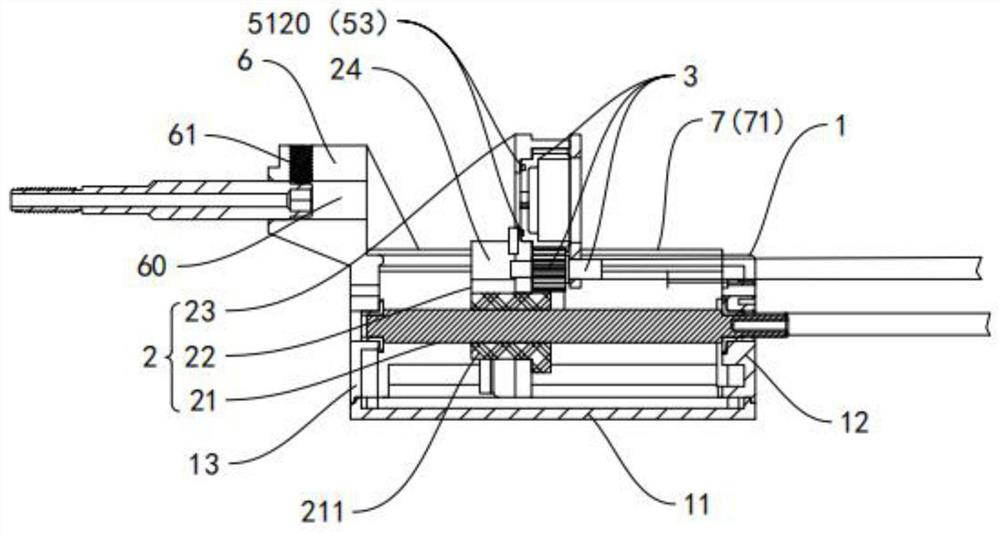
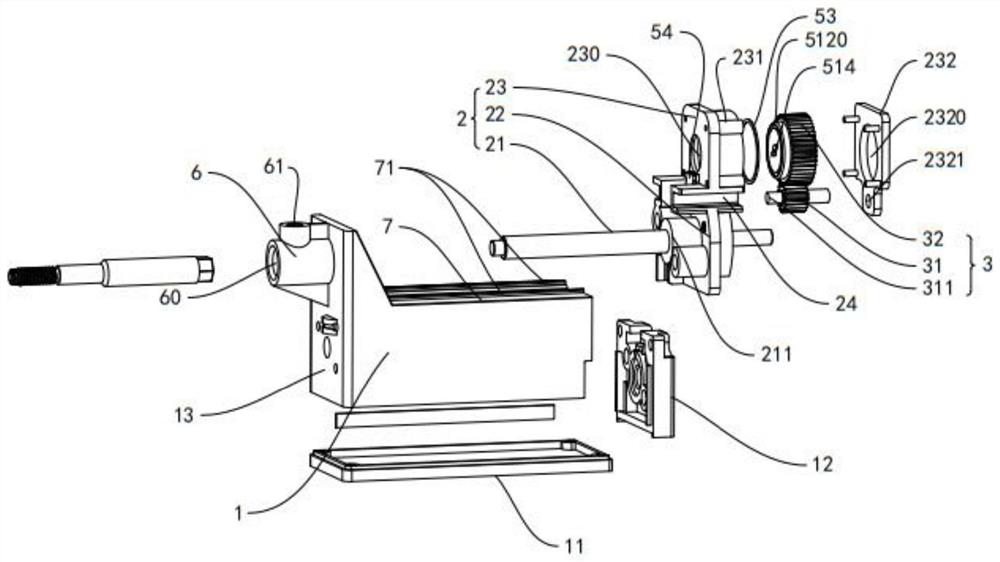
[0077] The ring neck 231 includes a first ring neck 2311 and a second ring neck 2312 , and the connection between the first ring neck 2311 and the second ring neck 2312 forms a stepped shape. Correspondingly, the side of the driven wheel 32 that conflicts with the linear driven moving part 23 has a stepped abutting surface that is adapted to the ring neck 231 . That is to say, the ring neck 231 (or the linear driven moving part 23) and the driven wheel 32 are installed together through at least one step surface, and the ring neck 231 (or the linear d...
Embodiment 3
[0087] Further, as Figures 5B-5CAs shown, the driven wheel 32 is provided with a fiber catheter fixing part inside, and the fiber catheter fixing part includes a fiber catheter holder 51 and a fiber catheter fixing part 52, and the fiber catheter fixing part 51 and the fiber catheter fixing part 52 are detachable For mating connection, the optical fiber conduit holder 51 is fixedly fitted inside the driven wheel 32 .
[0088] Specifically, the optical fiber catheter fixer 51 is a stepped cavity structure, and the cavity structure includes a first cavity 511 and a second cavity 512 . The first concave cavity 511 and the second concave cavity 512 are both cylindrical concave cavity structures, they are coaxially arranged and adjacent to and communicate with each other, and the diameter of the first concave cavity 511 is larger than that of the second concave cavity 512 The diameter of the two adjacent to form a right-angle boss 513.
[0089] Further, a positioning groove 514 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More