Electrically-driven rigid-flexible coupling water snake robot
An electric drive and robot technology, applied in the field of robots, can solve the problems of inability to meet the complex underwater operating environment, poor environmental adaptability, poor flexibility, etc., and achieve the effects of simple structure, poor flexibility, and fast movement speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
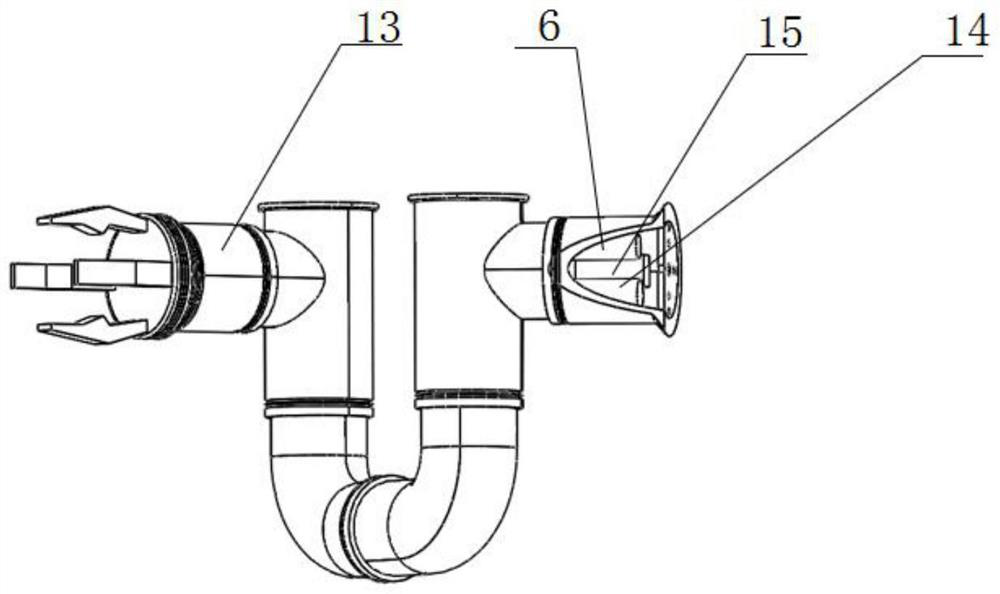
[0050] like Figures 1 to 11 As shown, this embodiment provides an electrically driven rigid-soft coupled water snake robot 100, which mainly includes a snake body skeleton, an electric drive mechanism, a bionic snake skin 5 and a control mechanism 6, and the snake body skeleton includes a snake head 1, a snake body torso 2 and a snake tail connected in sequence. 3. The snake body trunk 2 includes a number of trunk segments 4 connected in sequence, and any trunk segment 4 is a soft coupling structure, which includes a flexible support jacket 41, a variable stiffness spine 42 and multiple groups of elastic expansion and contraction parts 43, multiple groups of elastic expansion and contraction. The parts 43 are distributed on the outer circumference of the variable stiffness spine 42, and the flexible support jacket 41 is covered on the outer circumference of multiple groups of elastic expansion and contraction parts 43; both ends of any elastic expansion and contraction part 43...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



