

Unmanned aerial vehicle system with intelligent obstacle avoidance and fixed-height cruising functions and control method
An intelligent obstacle avoidance and control method technology, applied in three-dimensional position/channel control and other directions, can solve problems such as difficulties and drone collision accidents, and achieve the purpose of reducing computing time, speeding up reaction speed, and reducing time and power consumption. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0105] First of all, the automatic obstacle avoidance function is turned on synchronously with the take-off control of the drone;
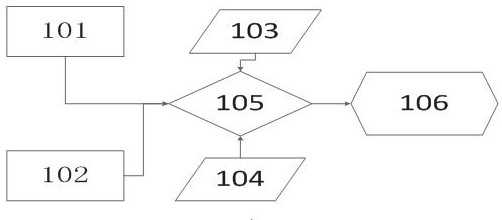
[0106] At the same time when the fixed-wing UAV takes off, the independent computing module, the forward lidar acquisition unit 101 and the downward lidar acquisition unit 102 in the data processing unit 105 start working synchronously. Perform thinning processing with the three-dimensional point cloud data collected by the downward laser radar acquisition unit 102 to obtain a thinned point cloud set; the thinned point cloud set includes: a forward thinned point cloud set and a downward thinned point cloud set;
[0107] Secondly, the slicing operation is performed on the forward thinning point cloud set and the downward thinning point cloud set. At this time, the cruising height of the fixed-wing UAV reaches 3500 meters; the actual height of the UAV is obtained in real time through the height position sensor 104;
[0108] Calculated by the height fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More