

Miniature manipulate with piezoelectric-type flexible drive and adjustable range
A micro-clamping and gripping hand technology, which is applied in the field of piezoelectric flexible drive amplifying and adjustable range micro-grip hands, can solve the requirements that cannot meet the operation requirements of various micro-devices, and the interchangeability and compatibility of the clamping system Insufficient, inability to operate micro-devices, etc., to achieve the effect of ensuring miniaturization, strong bearing capacity, and small operating space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
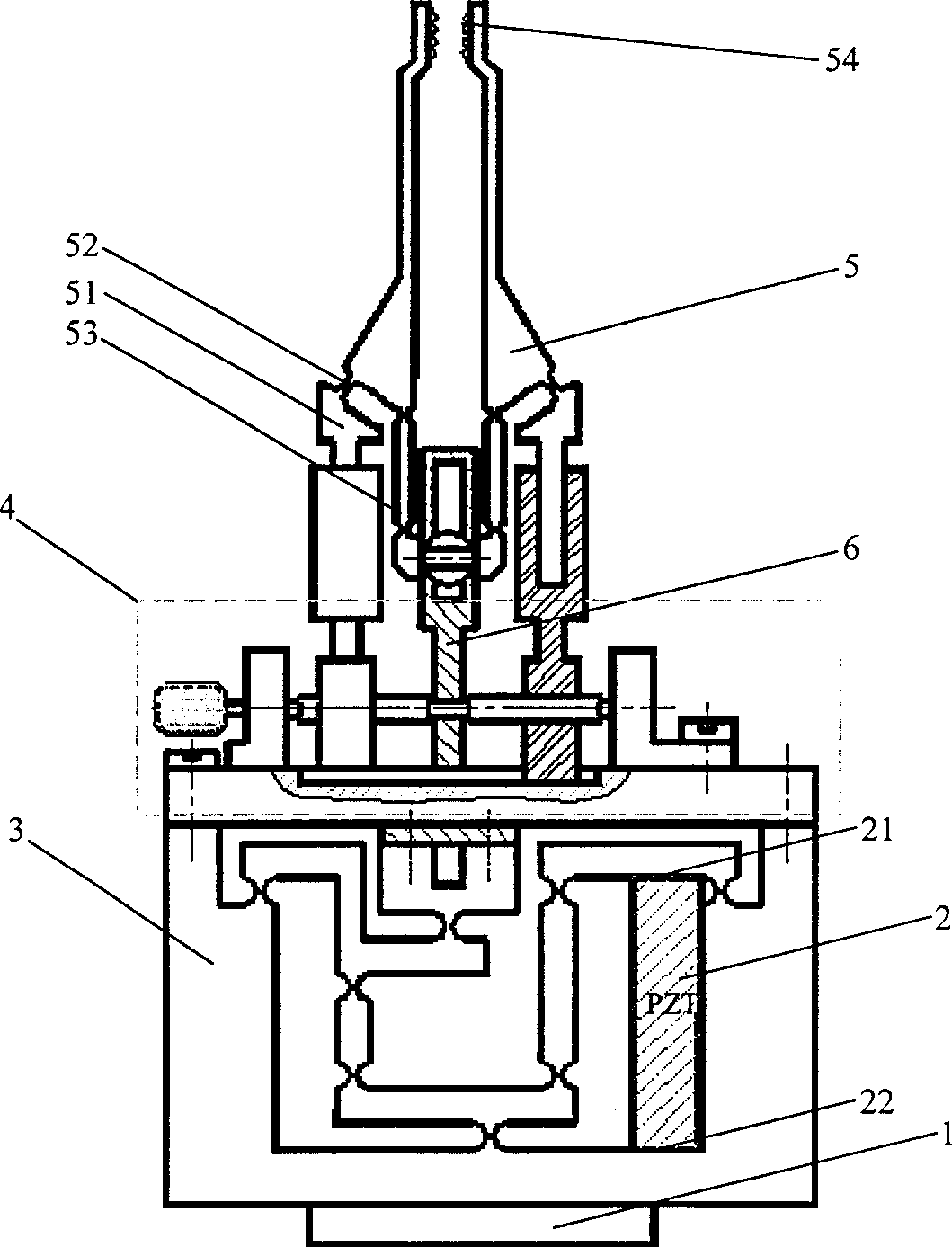
[0012] Such as figure 1 As shown, the piezoelectric flexible drive amplification adjustable range micro gripping hand designed by the present invention includes a micro actuator 2 , a flexible amplification mechanism 3 , a size preset mechanism 4 and a micro gripping hand 5 . The flexible amplifying mechanism is fixed on the mounting plate 1, the size pre-adjusting mechanism 4 is fixed on the upper part of the flexible amplifying mechanism 3, and the micro-clamping hand 5 is placed on the upper part of the size pre-adjusting mechanism 4. The upper part of the micro clamping hand is a jaw 54, and the clamping hand of the lower part is hinged with the fixed rod 53 inserted in the screw pair 41 of the size presetting mechanism 4 through a flexible hinge 52. The pulling rod 53 that is positioned at the lower part of the slightly clamping hand and is hinged with the clamping hand is relatively fixed with one end of the elastic pull rod 6 in the size preset mechanism. The other end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More