

Theta angle iteration compensation method in linear motor vector control
A technology of vector control and linear motor, applied in vector control system, motor generator control, electronic commutation motor control, etc., can solve problems such as θ angle deviation of linear motor control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0020] The formula that the present invention adopts is described in detail below:
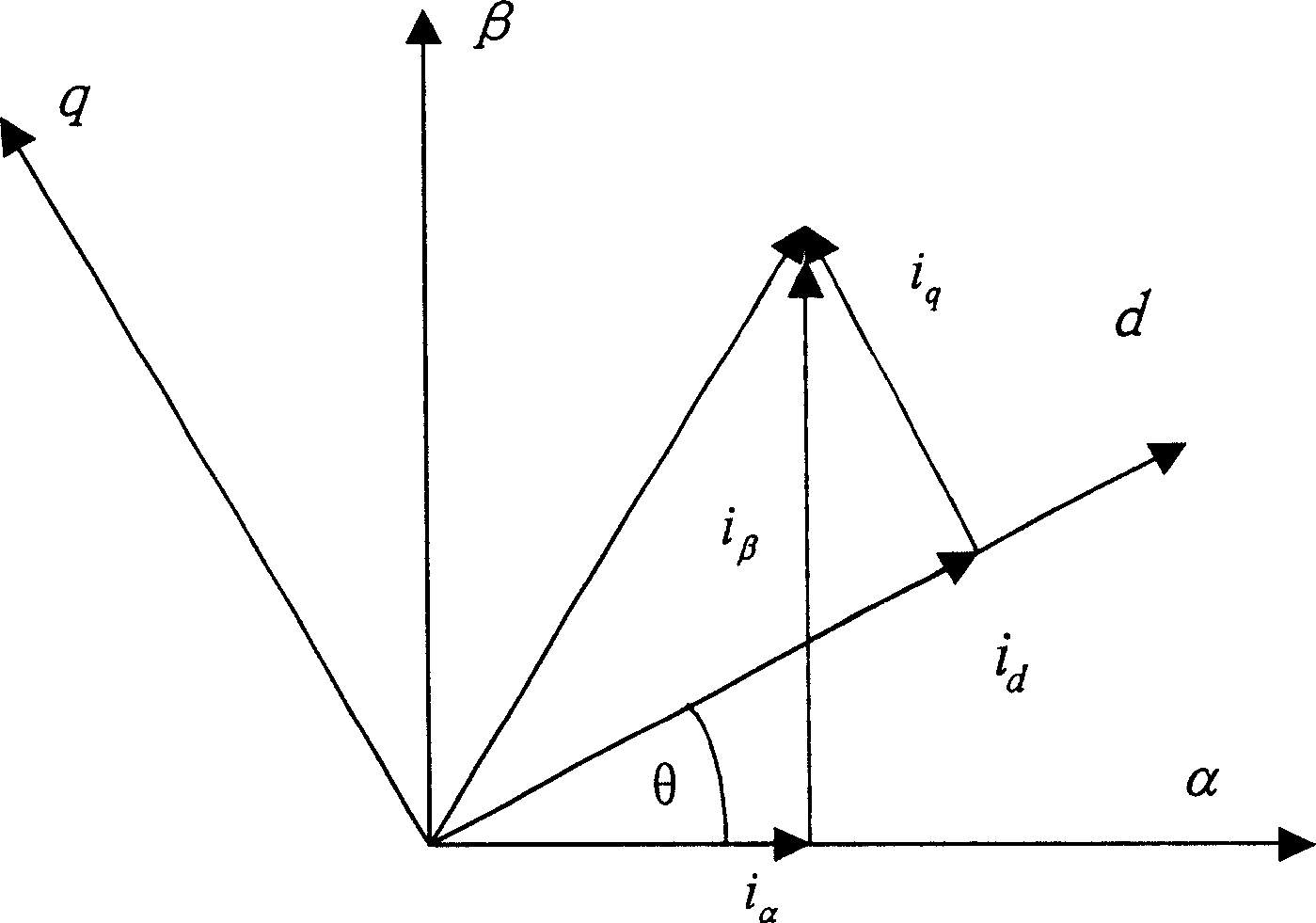
[0021] (1) The input parameter of the θ angle compensation method is the excitation current (i d ), torque current (i q ), the angular velocity equivalent of the motor (ω), the estimated value of the excitation current Torque current estimate Estimator of Angular Velocity Equivalent and the θ angle calculated by measuring its position; the calculation method of θ angle is
[0022] θ = mod ( p d ) * ( 2 π )
[0023] Among them, p is the displacement detected by the displacement sensor, d is the pole distance of the linear motor, and mod is the modulo operation.
[0024] (2) Compensation must first be based on i d i q Estimate the actual value of the θ angle, and the estimated value is obtained by id...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More