

Guiding tool of operation
A technology of surgical navigation and tools, applied in surgical navigation systems, surgery, stereotaxic surgical instruments, etc., can solve problems affecting the detection accuracy of surgical tools by the optical positioning system, vibration of difficult hand-held surgical tools, positioning errors of surgical tools, etc. Achieve the effects of strong movement intuition, shortening the postoperative recovery period, and stabilizing the instantaneous transmission ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
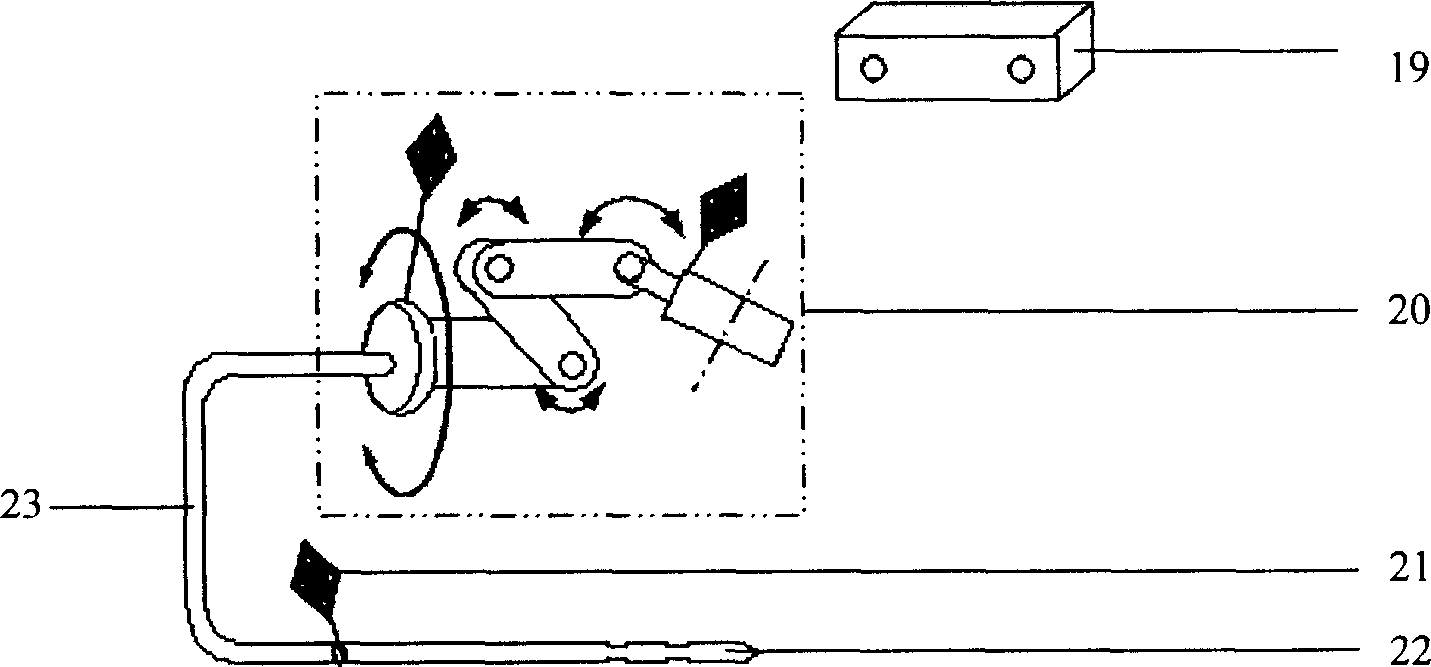
[0021] Such as figure 1 As shown, the reference numeral 20 (within the dotted line) is the surgical navigation tool of the present invention, and its implementation cannot be separated from the optical positioning tracking system 19, the optical tracking marker 21, the clamping tool 23, and the surgical prosthesis. Taking the intramedullary nail 22 implantation operation as an example, it has a certain bending deformation during insertion into the curved bone marrow cavity of the patient, which causes the shape deformation and position shift of the locking nail hole at the distal end of the intramedullary nail, resulting in the locking nail Insertion is very difficult. With the help of the optical positioning tracking system 19 and the X-ray image of the mobile C-arm in the operating room, the positional relationship of the keyhole at the distal end of the intramedullary nail relative to the navigation tool 20 can be determined, and the ideal position of the guide plate at the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More