

Device and method for measurement of ultrasonic transit times
a technology of ultrasonic wave and transit time, which is applied in the direction of measurement devices, speed/acceleration/shock measurement devices, instruments, etc., can solve the problems of affecting the accuracy of ultrasonic flow sensors, the strength of received signals and predefined threshold values is subject to electronic noise, and the transit time changes not only with flow velocity, but also with fluid properties and electronic noise levels. , to achieve the effect of accurate and reliable measurement of transit times, improving the velocity measurement accuracy of ultra
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
Tm=NTr−t1.[0045]Obviously, the transit-time Tm obtained by prior art differs from the one obtained by the present disclosure by N1Tr / 2. This difference does not have any impact on the flow measurement, because the flow rate is calculated based on transit-time difference between upstream Tm and downstream Tm. In addition, the difference can be calibrated so to have accurate transit-time measurement.
[0046]FIG. 3 (a) illustrates the transit time measurement error caused by the threshold level fluctuation of prior art. In this case the time measurement error is:
ΔTm=|Δt1|.
[0047]FIG. 3 (b) illustrates the transit time measurement error caused by signal amplitude fluctuation of prior art. In this case the time measurement error is:
ΔTm=|Δt1|.
[0048]FIG. 4(a) illustrates the transit time measurement error caused by threshold fluctuation of the first embodiment of the present disclosure. In this case the time measurement error is:
ΔTm=|Δt1+Δt2| / 2.
[0049]FIG. 4(b) illustrates the transit time mea...
second embodiment
[0073]FIG. 7 illustrates the transit time measurement error of the present disclosure. In this case the time measurement error is:
ΔTm=|Δt1+Δt2+Δt3+Δt4| / 4.
Since (Δt1, Δt2) and (Δt3, Δt4) change in opposite directions, their average is always smaller than |t1|. This indicates that the ultrasonic wave transit time measurement accuracy is greatly improved using the method of the present disclosure compared to the method of prior art.
third embodiment
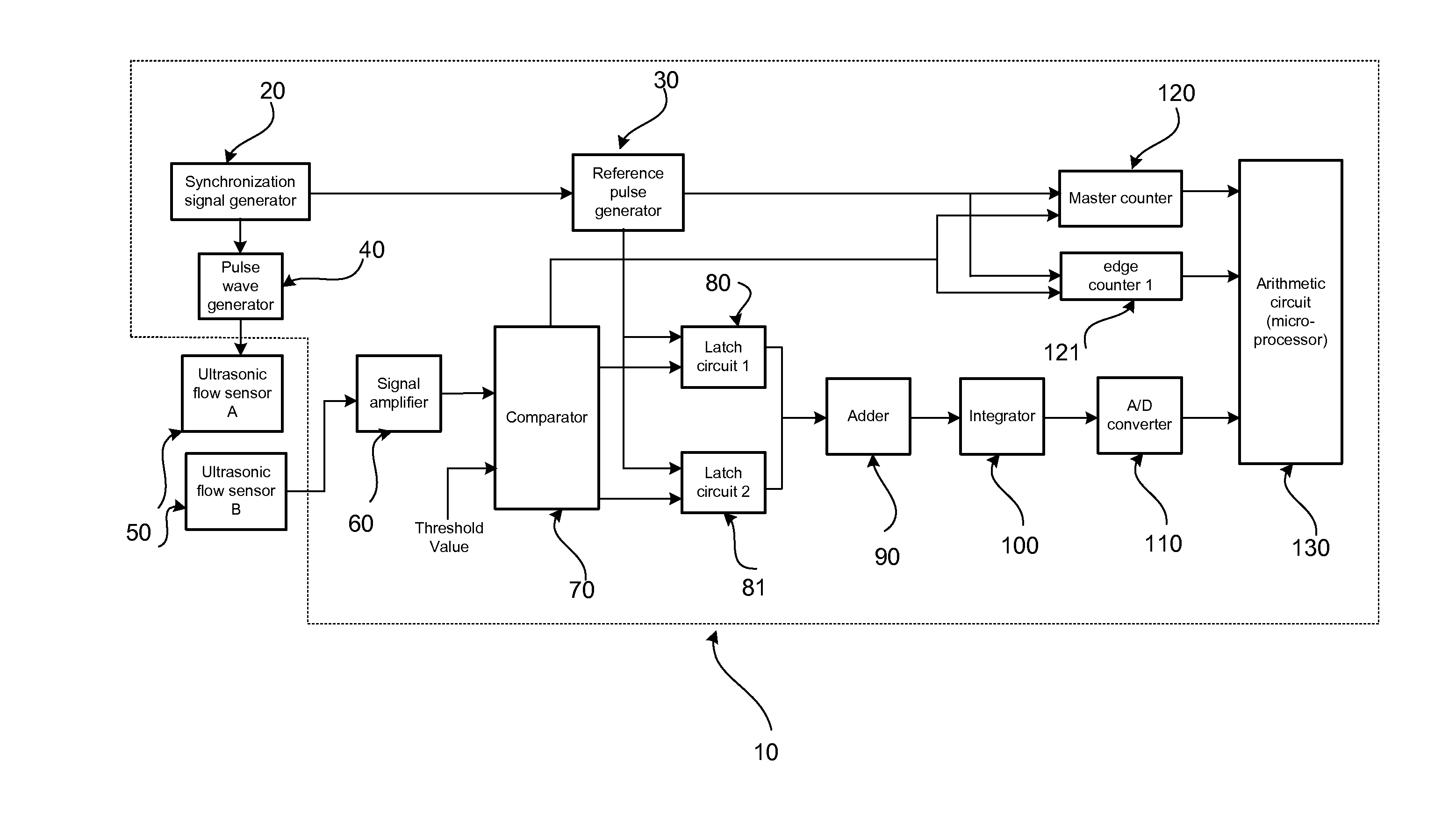
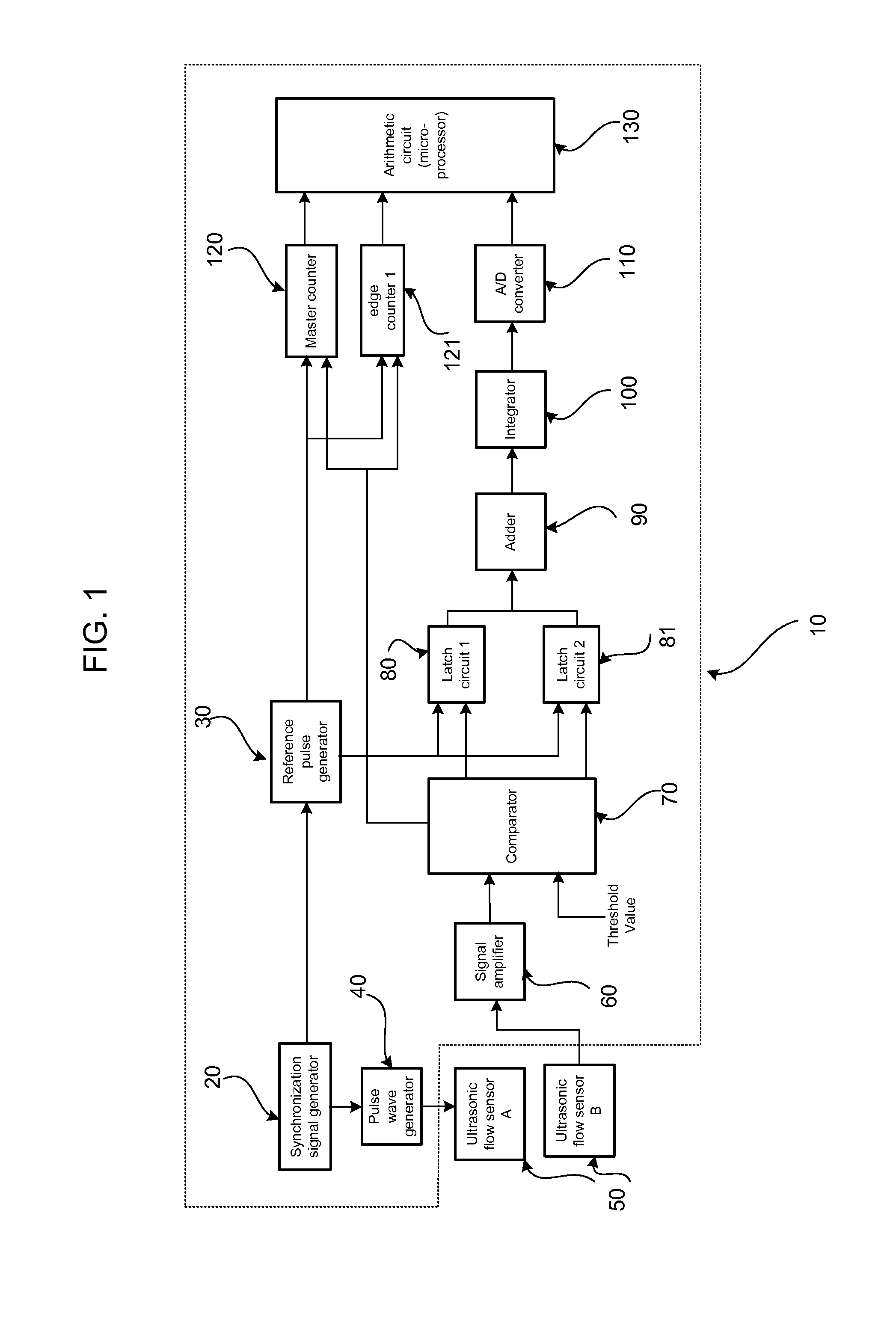
[0074]FIG. 8 illustrates an electronic device for measuring the ultrasonic wave transit times of the present disclosure. In this embodiment, the device 10 consists of a synchronization signal generator 20, a reference pulse generator 30, a sine wave generator 40, an analog signal amplifier 60, a comparator 70, eight latch circuits 80-87, a digital adder 90, an integrator 100, an A / D converter 110, a master counter 120, seven edge counters 121-127, and an arithmetic circuit 130.
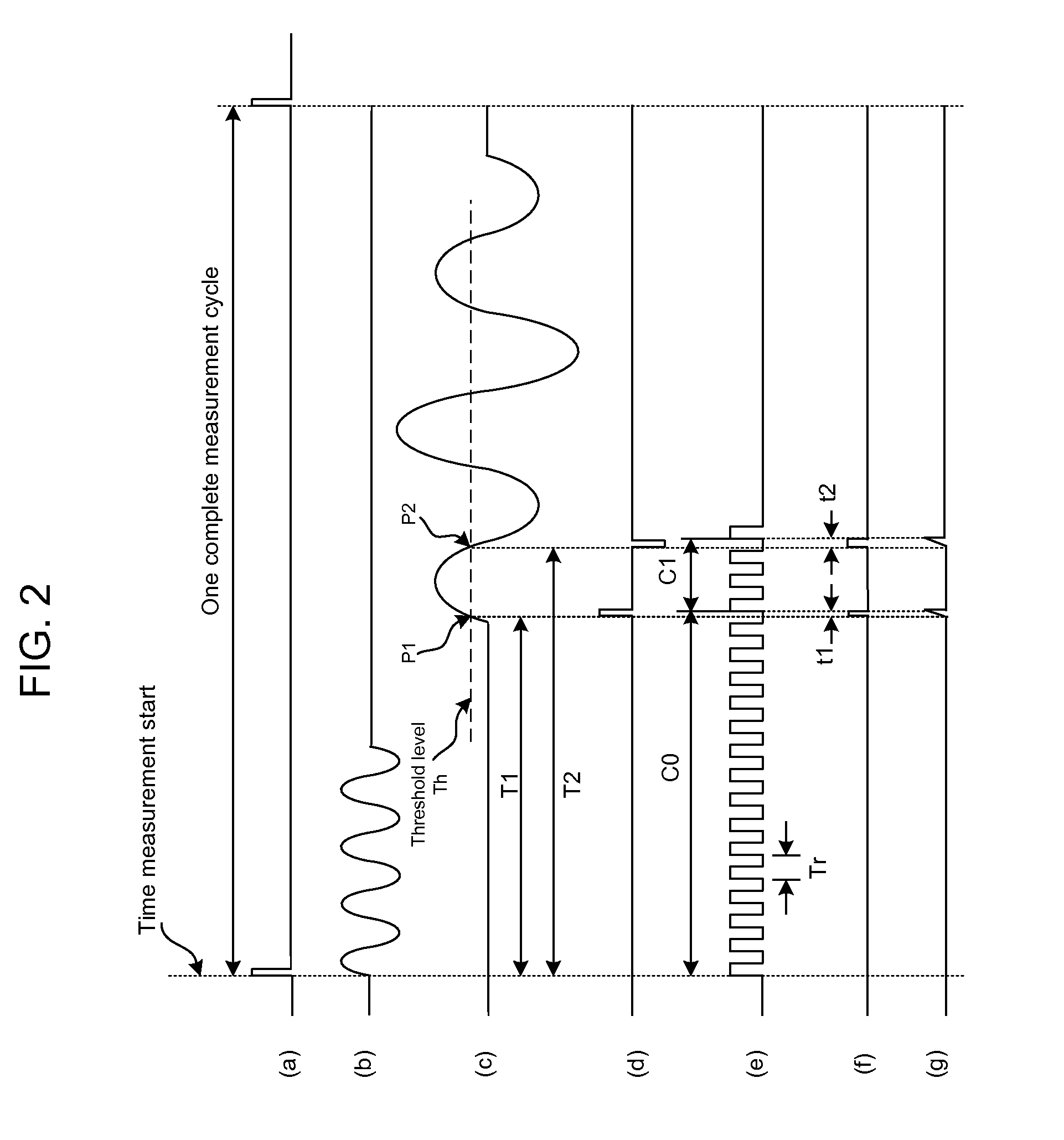
[0075]Referring to FIGS. 8 and 9, the synchronization signal generator 20 outputs a pulse shown in FIG. 9a. This pulse is used to perform the following functions: 1) initiating the measurement cycle, 2) triggering the sine wave generator 40 to start sending sine wave signal to the transmitter of the ultrasonic flow sensor 50, 3) triggering the reference pulse generator 30 to start generating high frequency clock signal, and 4) commanding the master counter 120 to start counting the reference clock cycles.
[0076...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More