

Dual resonance frequency driving method of magnetic mini travel robot
A dual-resonant frequency, driving method technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the problem of inability to achieve two-way swimming, difficult robot control, leakage Safety and other issues, to achieve the effect of improving reliability and practicability, easy detection, and stable attitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
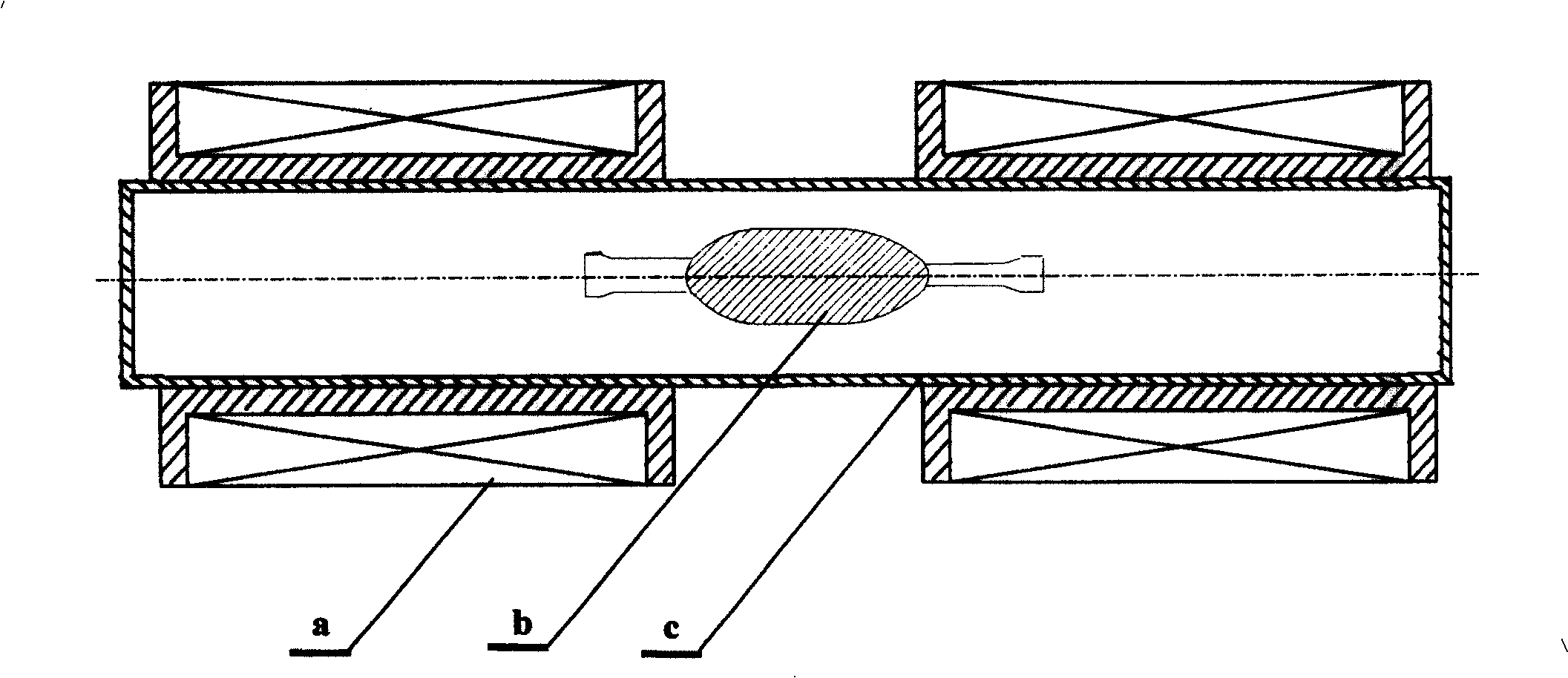
[0033] combined with figure 1 , in the figure: a is a Helmholtz double coil; b is a two-way swimming microrobot; c is a closed pipe filled with liquid. figure 1 The power amplifier of the drive controller of the Helmholtz double coil a in the system adopts a deep current negative feedback amplifier circuit to improve the rapid response of the drive current, eliminate the hindrance of the inductance to the AC drive current, and make the current response in the drive coil better Substantial improvement. Drive the Helmholtz double coil a with a sine wave. figure 1 The closed pipe c filled with liquid in the method is made of plexiglass, which is convenient for observing and detecting the swimming of the robot.
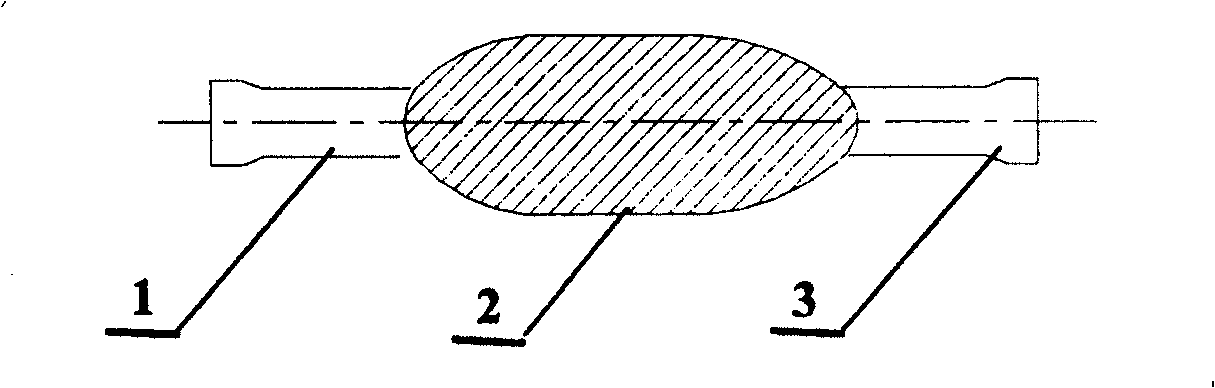
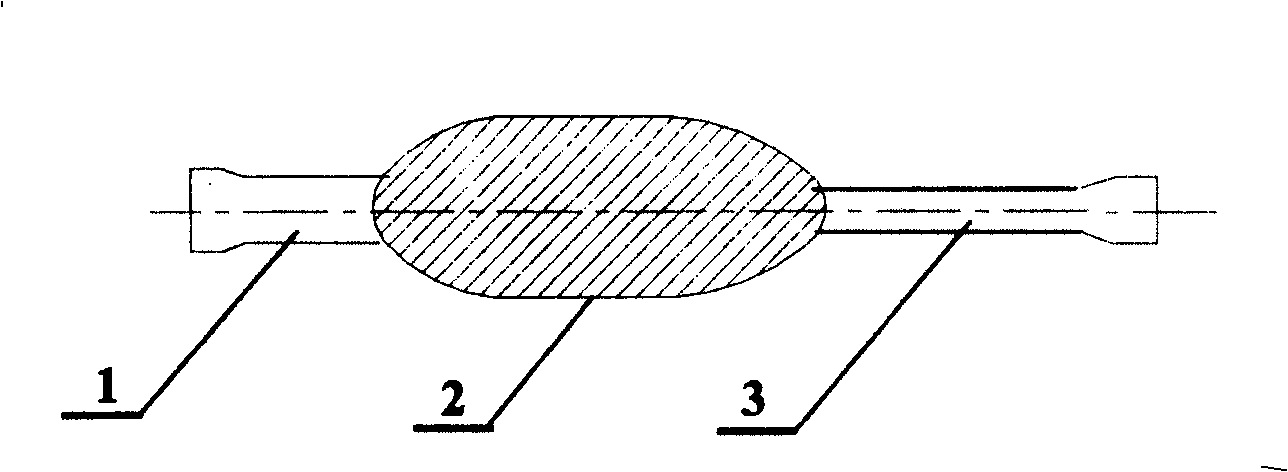
[0034] exist figure 2 In the process, the structural design of the front-end driver 1 and the back-en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More