

Submarine mechanical claw structure
An underwater manipulator and gripper technology, which is applied to manipulators, underwater operation equipment, ships, etc., can solve the problem that the specific structure of the gripper is not given, the specific structure of the hydraulic gripper is not given, and the specific structure of the gripper of the manipulator is not given. structural form and other issues, to achieve the effect of light weight, simple structure and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in more detail below in conjunction with accompanying drawing example:
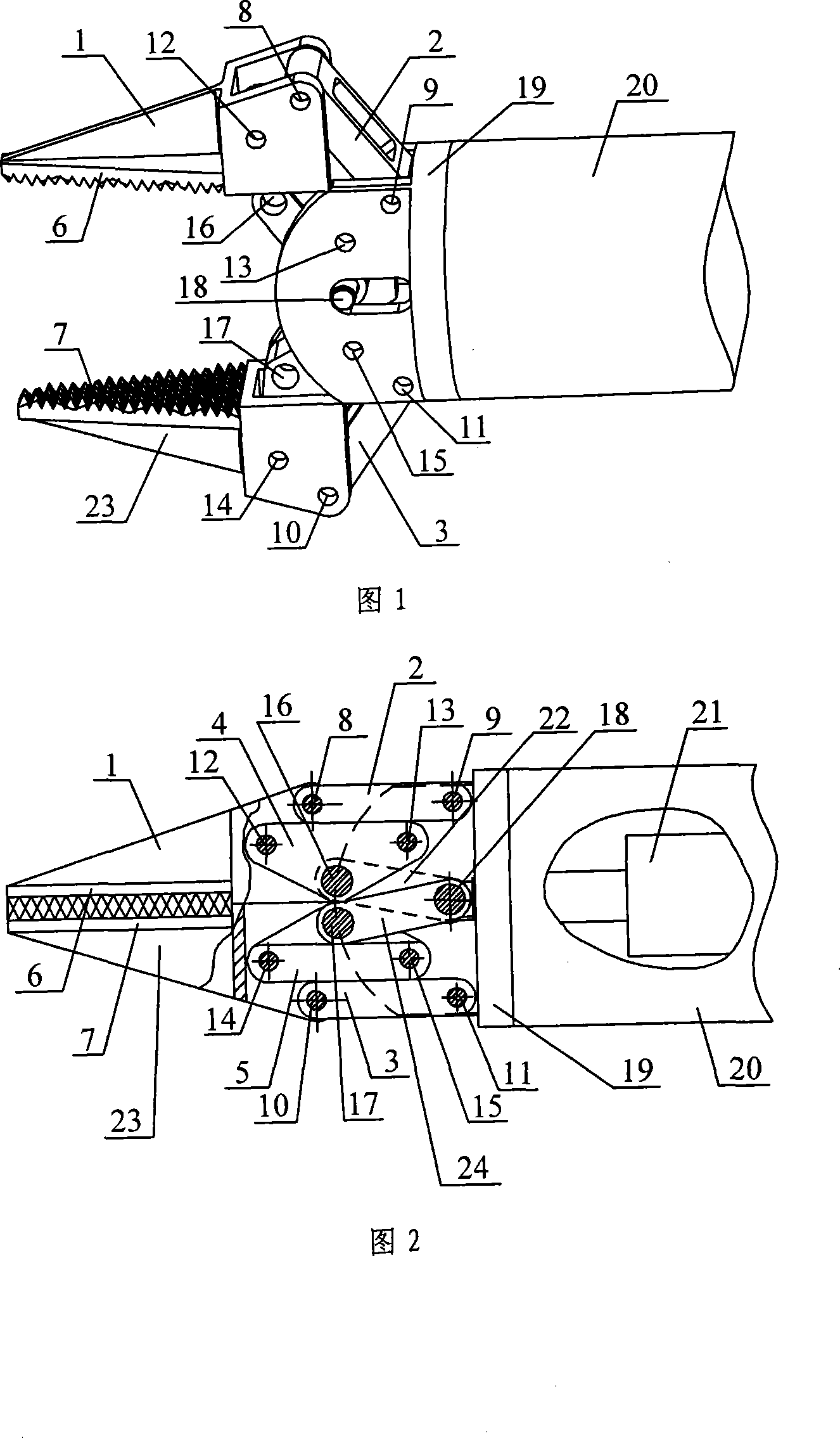
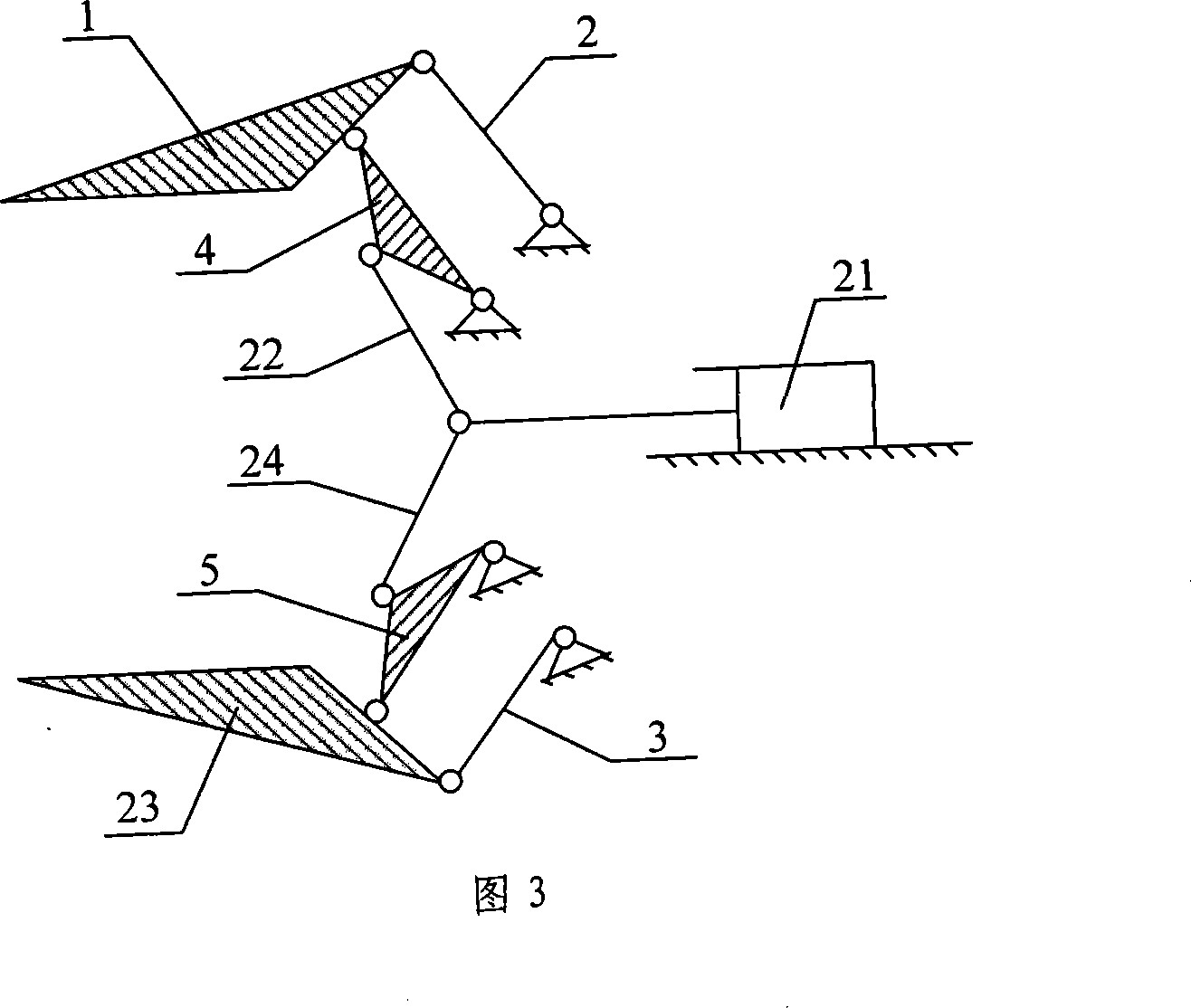
[0019] Combining Figure 1 and Figure 2, the jaw structure of the underwater manipulator consists of finger claw I1, finger claw II23, outer link I2, outer link II3, inner link I4, inner link II5, rubber layer I6, rubber layer II7, Outer link pin I8, outer link pin II9, outer link pin III10, outer link pin IV11, inner link pin I12, inner link pin II13, inner link pin III14, inner connecting rod small pin IV15, inner connecting rod large pin I16, inner connecting rod large pin II17, hydraulic cylinder pin 18, base 19, wrist 20, hydraulic cylinder 21 and connecting rod I22, connecting rod II24; wherein the rubber layer I6 is inlaid on the claw I1, and the rubber layer II7 is inlaid on the finger II23; the outer link I2 passes through the outer link pin I8, the outer link pin II9, the finger I1 and the base 19, the outer connecting rod II3 is connected with the finge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More