

Multi-target multi-sensor information amalgamation method based on convex optimized algorithm
A convex optimization algorithm, multi-sensor technology, applied in the direction of instruments, navigation calculation tools, satellite radio beacon positioning systems, etc., can solve problems such as unsatisfactory practical application, poor Kalman filtering performance, and easy interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
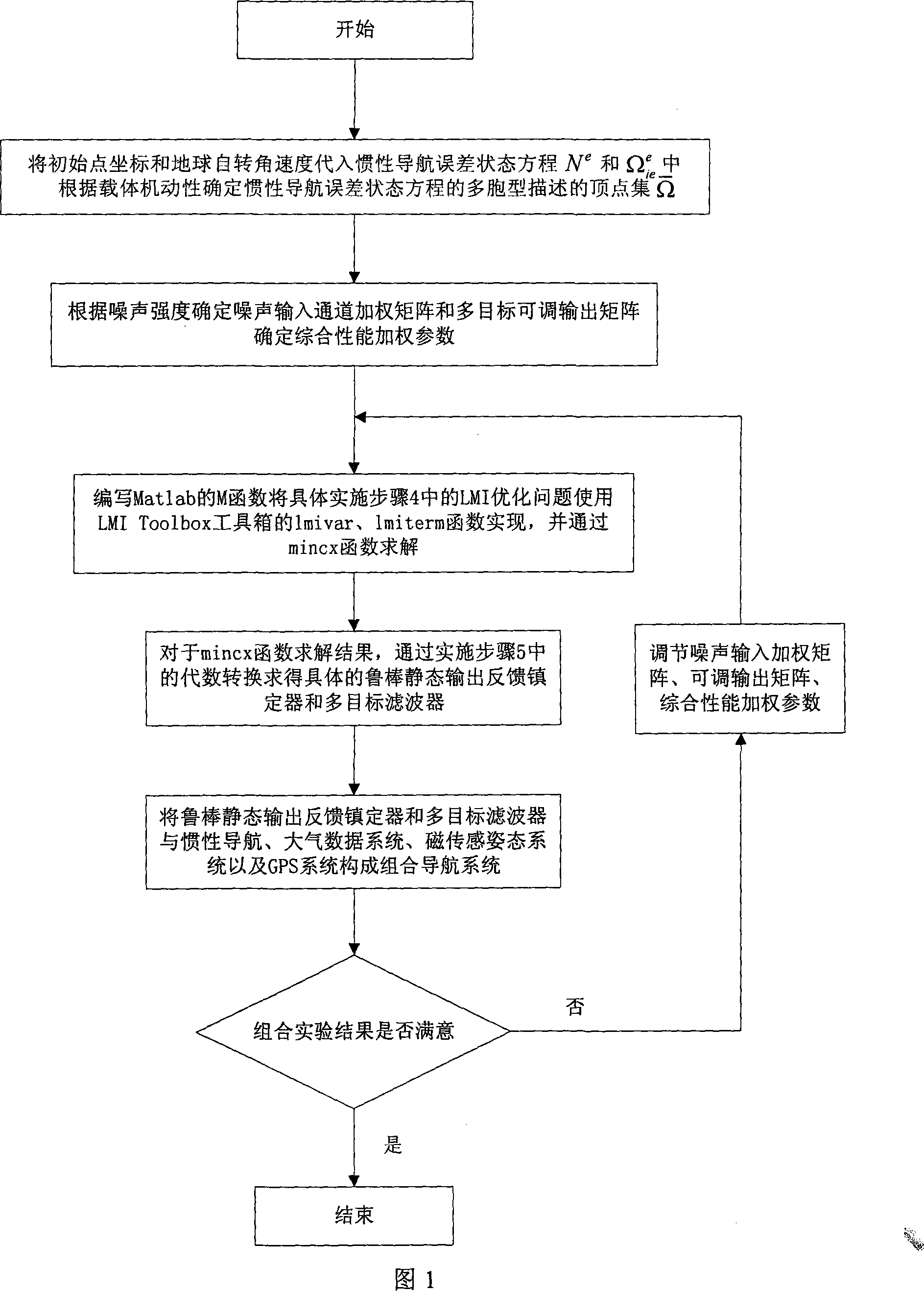
[0020] As shown in Figure 1, the specific implementation steps of the present invention are as follows:
[0021] 1. Take the change of parameters in the SINS error state equation in the earth coordinate system as the uncertainty of the system, and use the multicellular model of the uncertain system to describe the SINS error state equation in the Earth coordinate system.
[0022] Among them, the polymorphic description of establishing the error state equation of the strapdown inertial navigation system is as follows:
[0023] (1) Discretized earth coordinate system strapdown inertial navigation error state equation:
[0024] x(k+1)=A·x(k)+B 1 ·w 1 (k)=A·x(k)+B·w(k)
[0025] A = I + T 2 N e ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More