

Intestinal tract diagnosing and treating robot system and motion control method thereof
A robot system and motion control technology, applied in the field of biomedical engineering, can solve the problem of difficult heat dissipation of the driving mechanism, lack of good solutions, hidden dangers of biological safety, etc., to overcome energy supply bottlenecks, good biocompatibility, The effect of optimal biocompatibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
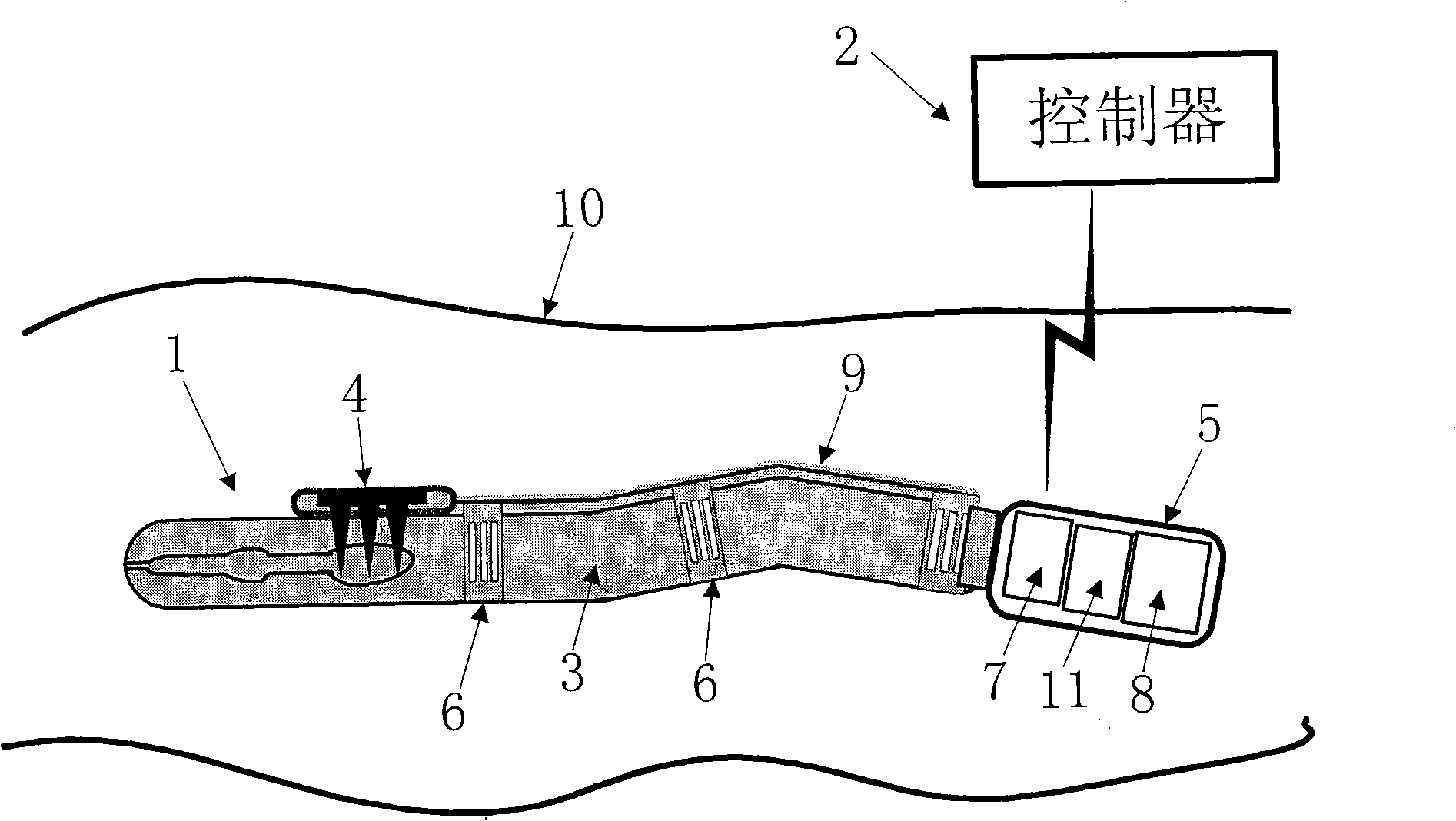
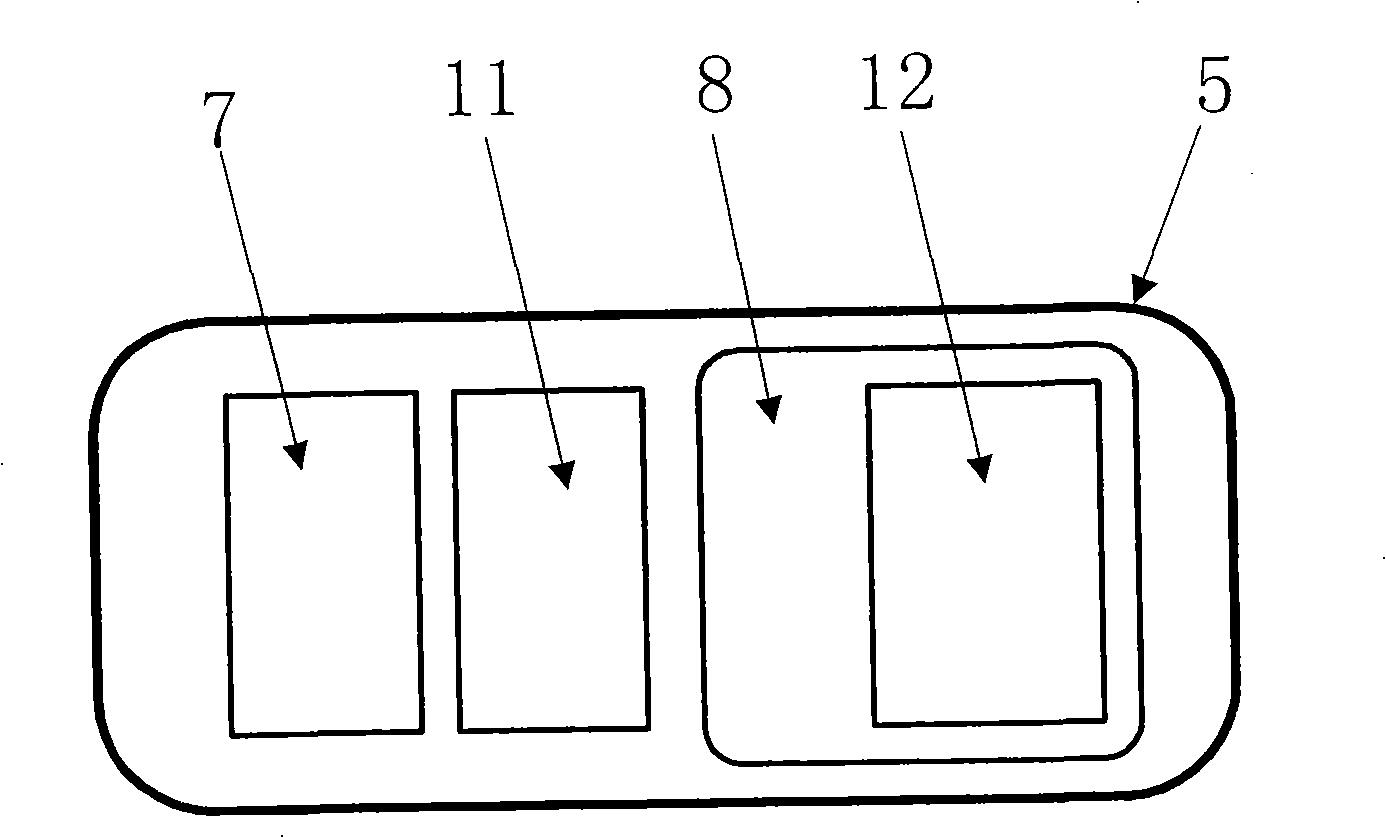
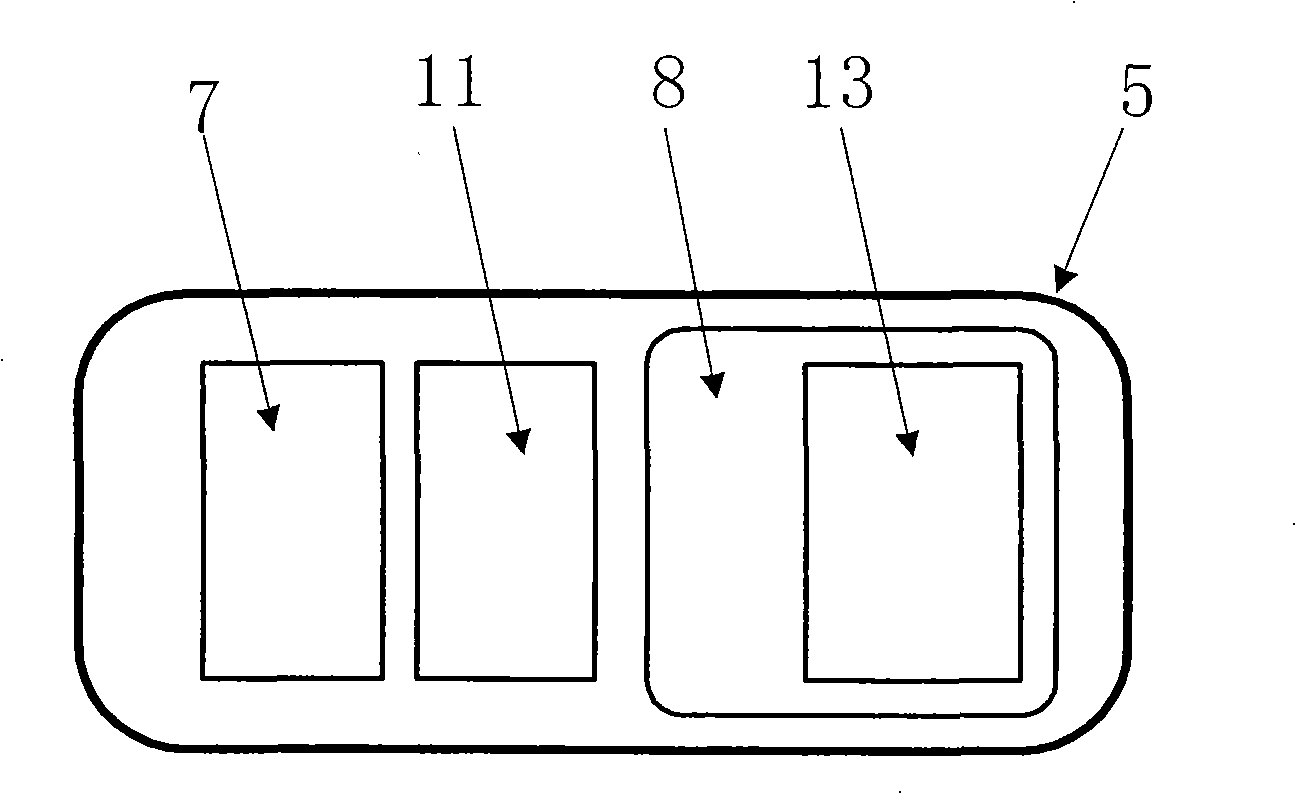
[0037] The overall composition of the intestinal diagnosis and treatment robot system in this embodiment is as follows: figure 1 As shown, the system includes: an intestinal diagnosis and treatment robot 1 that can enter the intestinal tract of an animal or human body through the anus, and a controller 2 located outside the intestinal tract of an animal or human body. In this embodiment, the intestinal diagnosis and treatment robot 1 and the controller 2 are not physically connected. Fixed connection, information exchange through radio signals. The intestinal tract diagnosis and treatment robot 1 includes a motion driving body 3, several stimulating electrodes 4, a diagnosis and treatment chamber 5, and a flexible fixing ring 6. The stimulation electrodes 4 and the movement driving body 3 are fixedly connected, and the diagnosis and treatment chamber 5 includes a motion control circuit 7 , a micro diagnosis and treatment unit 8 and a battery 11, the battery 11 is used to provi...
Embodiment 2
[0044] The overall composition of the intestinal diagnosis and treatment robot system in this embodiment is as follows: Figure 9 As shown, the system includes: an intestinal diagnosis and treatment robot 1 that can enter the intestinal tract of an animal or a human body through the anus, a controller 2 located outside the intestinal tract of an animal or a human body, the controller 2 in this embodiment and the diagnosis and treatment in the intestinal diagnosis and treatment robot 1 The warehouse can be connected through a flexible cable 15, and the controller 2 can perform energy supply and information interaction with the intestinal diagnosis and treatment robot 1 through the flexible cable 15. Compared with the embodiment 1, this embodiment has higher reliability in data transmission. performance, and the energy supply is more reliable. The intestinal tract diagnosis and treatment robot 1 includes a motion driving body 3, several stimulating electrodes 4, a diagnosis and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More