

Method for detecting and positioning leakage of oil-gas pipeline by utilizing autonomous navigation robot
A technology for oil and gas pipelines, positioning methods, applied in the direction of detecting the presence of fluid at the leak point, piping systems, liquid tightness measurement using liquid/vacuum degree, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
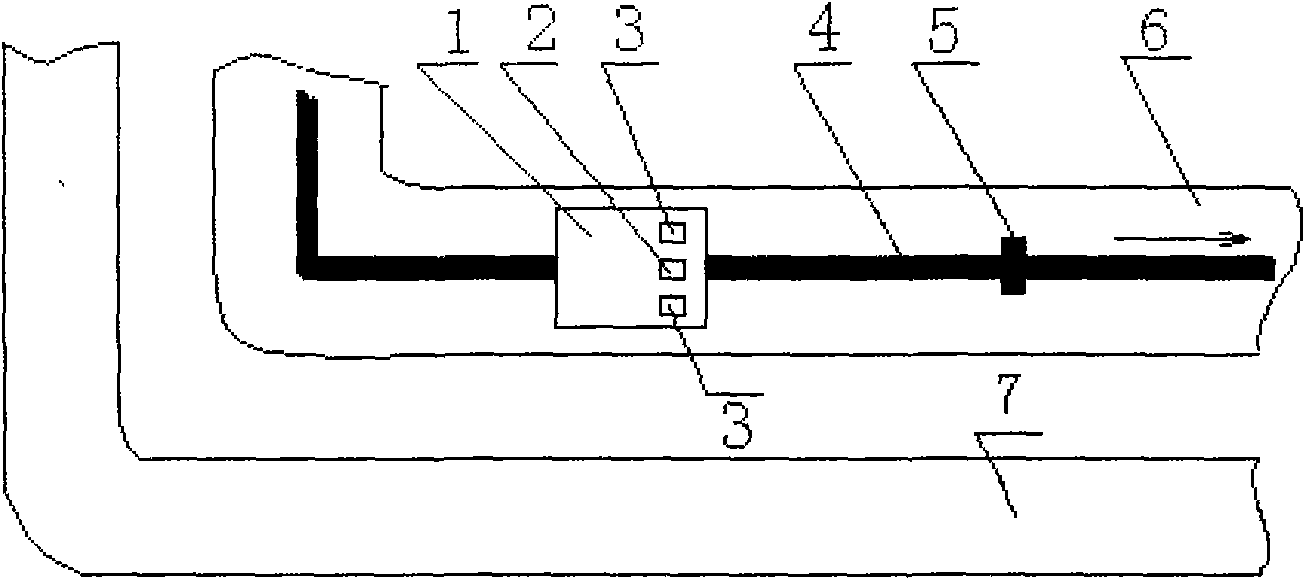
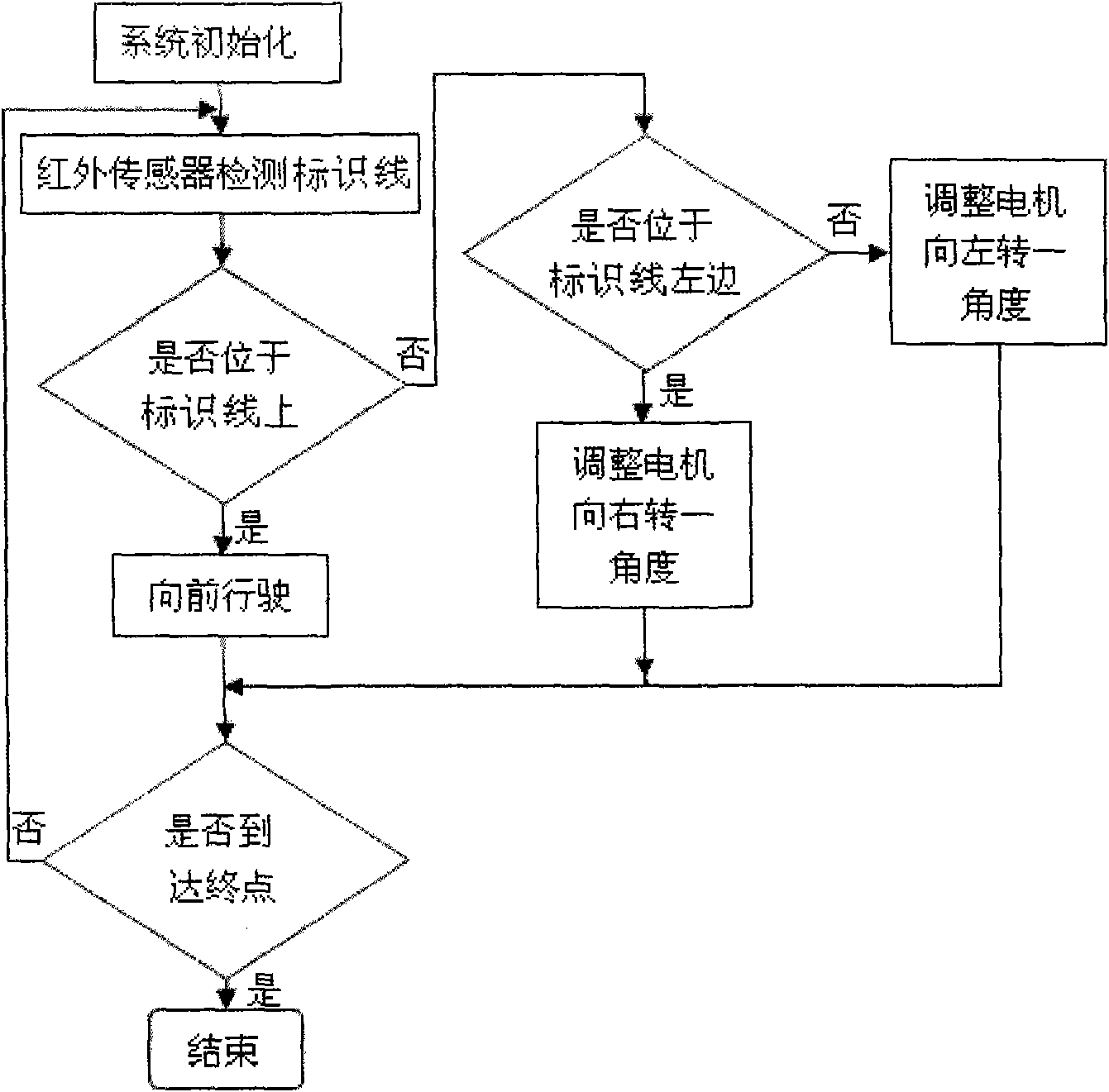
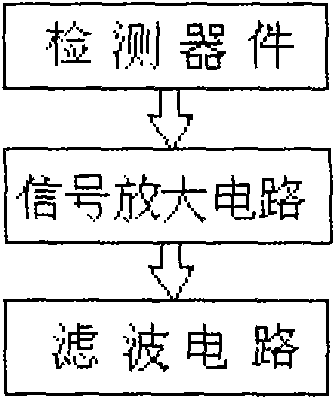
[0055] Embodiment 1: A method for detecting and locating oil and gas pipeline leakage using an autonomous navigation robot according to the present invention. A vehicle-mounted autonomous navigation robot is installed, and a small car body with wheels; self-loading power supply, navigation system, data acquisition combiner and wireless communication module, the navigation system includes a small car body with 2 pairs of wheels, and 3 infrared photoelectric sensors , control module, motor controller and motor. The reflective infrared photoelectric sensor ST188 is used; the control module uses TI's MSP430F169 single-chip microcomputer as the core device, the integrated module is rich, the number of I / O ports is objective, and the work is stable and reliable; the motor controller adopts the constant voltage and constant current bridge produced by S6S company Formula 2A driver chip L298. The walking status of the robot patrol line is as follows: figure 1 shown. When the robot 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More