

Hydraulic drive system of four-foot walking robot
A walking robot and drive system technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of complex robot leg structure, poor robot stability, and long charging time, and achieve convenient power distribution, fast dynamic response, and load-bearing strong ability effect
Inactive Publication Date: 2010-08-25
SHANDONG UNIV
View PDF6 Cites 37 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Almost all existing quadruped walking robots use battery-motor drive systems, which have the following disadvantages or deficiencies: ① small power / mass ratio, poor load capacity; ② limited battery capacity, poor battery life, and long charging time; ③The dynamic response is slow, and the stability of the robot is poor during dynamic walking; the characteristics of the motor are soft, and its dynamic characteristics are greatly affected by the change of the load;
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
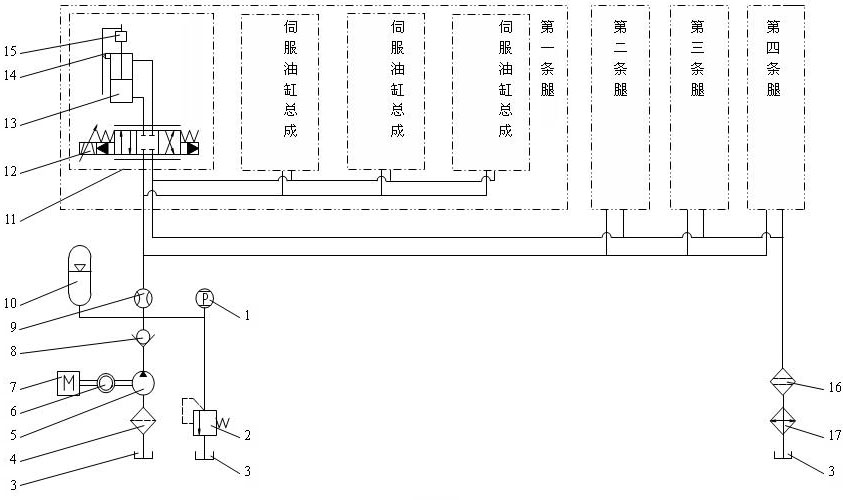
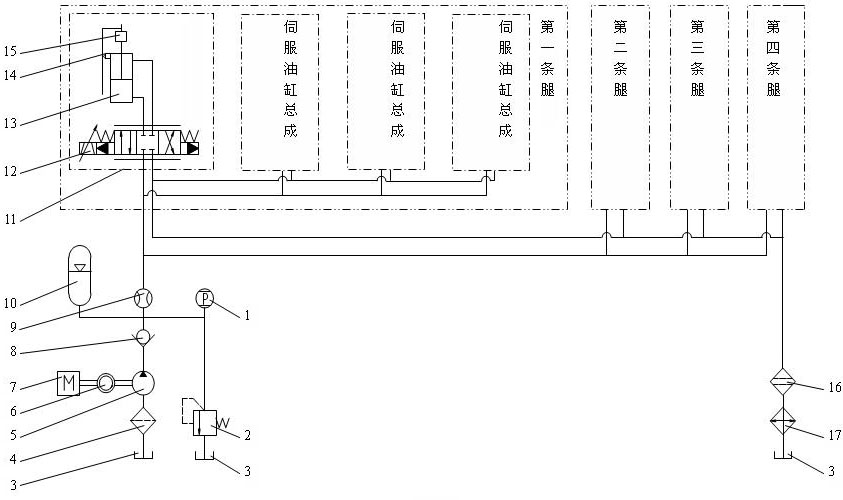
The invention relates to a hydraulic drive system of a four-foot walking robot. The hydraulic drive system comprises a servo cylinder assembly, wherein the servo cylinder assembly is respectively connected with a hydraulic power device and an oil return line by pipelines. The invention has the following advantages: 1. the power-mass ratio is large, thereby enhancing the weight loading capability of the robot; 2. the fuel can be conveniently filled, and the cruising power is high; 3. the robot has faster dynamic response capability, thereby being beneficial to the stability of the robot; 4. the robot has better speed rigidity, thereby reducing the effect of the load change on dynamic characteristics; 5. the allocation of the joint driving power is more convenient, thereby being capable of intensively supplying the system driving power to specified joints in a very short time to meet the driving requirements for special movement; and 6. the hydraulic cylinders can be easily arranged, thereby enabling the leg structure of the robot to be more simple and compact.
Description
technical field The invention relates to a quadruped robot drive system, more specifically a hydraulic drive system for a quadruped walking robot. Background technique At present, the commonly used mobile modes of ground mobile robots are mainly wheeled, crawler, peristaltic, crawling and walking. The wheeled mobile mechanism has the advantages of small frictional resistance and fast speed, but it is only suitable for a relatively flat ground environment, and its ability to overcome obstacles is poor. The crawler-type mobile mechanism has strong adaptability to the terrain environment, and can climb over obstacles, climb stairs, and cross trenches, etc., but the transmission efficiency is low. Creeping, crawling and walking are all bionic movement methods that imitate animals. They have strong adaptability to the terrain environment and can walk on most ground environments, and the walking method has the fastest movement speed. Walking quadruped robots have broad applicati...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J19/00
Inventor荣学文李贻斌阮久宏宋锐宋勇王海燕徐勤江
OwnerSHANDONG UNIV