

Real-time graph generation method for scene matching navigation technology
A scene matching and real-time image technology, applied in the direction of integrated navigator, etc., can solve the problems of camera parameter disturbance, geometric distortion of real-time image, image quality reduction, etc., and achieve the effect of high degree of digitization, easy implementation, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
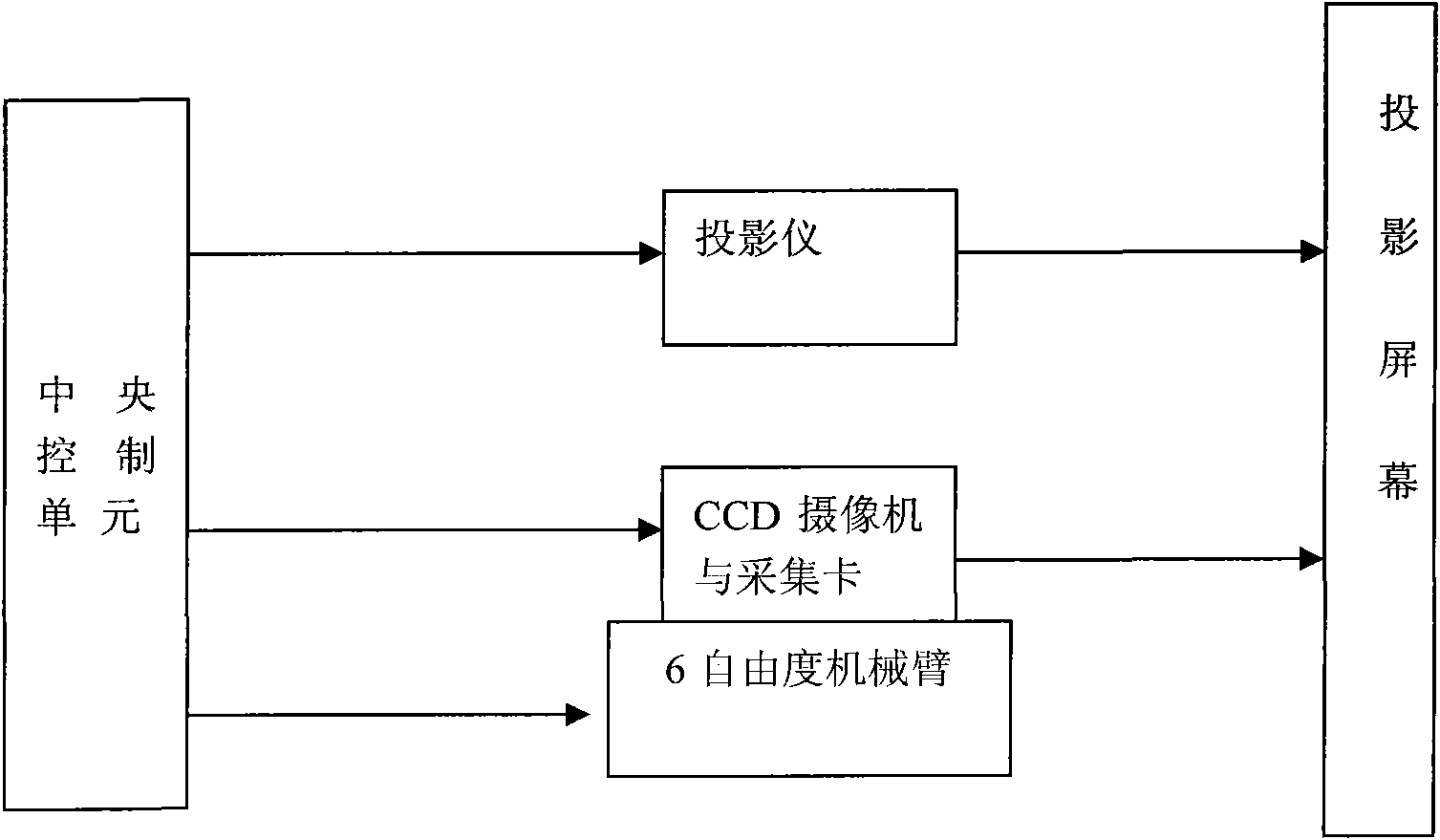
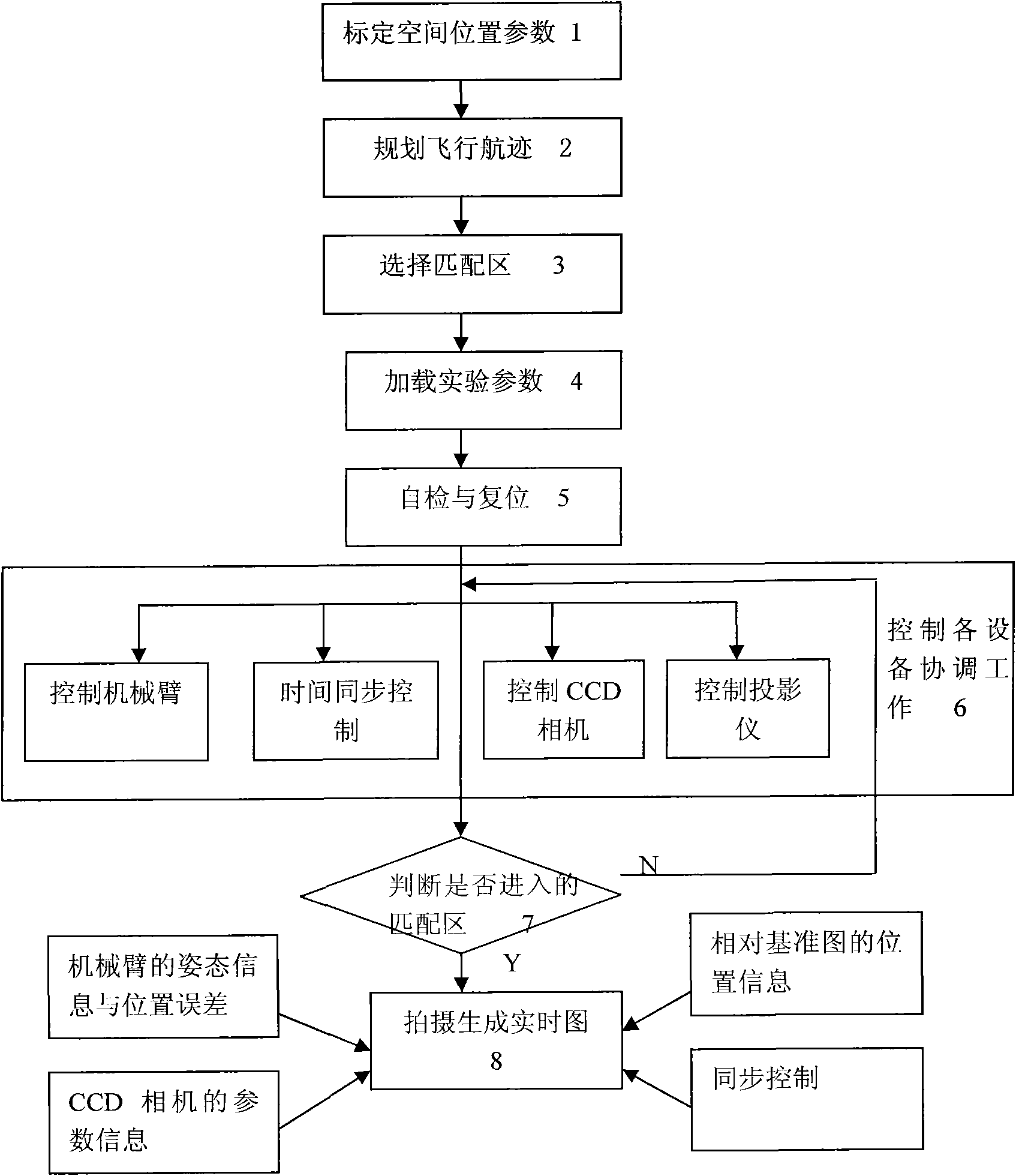
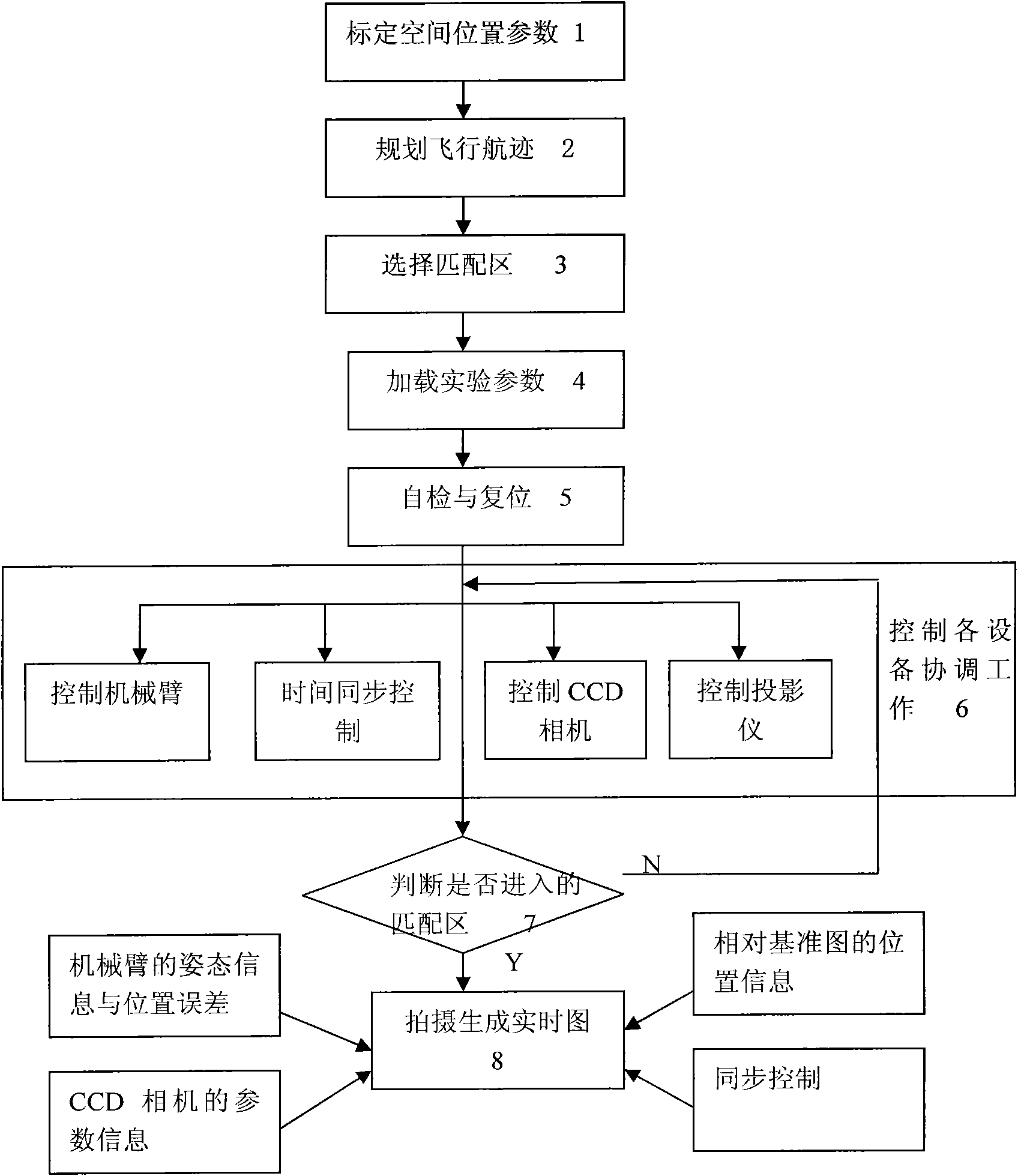
[0031] 1. Step 1 of calibrating the spatial position parameters of the physical test platform: Accurately calibrate the spatial position parameters between the CCD camera, projection screen, and projector, and realize the coordinate unification among the camera coordinate system, the screen coordinate system and the CCD camera coordinate system. Calibration of spatial position parameters can be done using a calibration field.
[0032] 2. Step 2 of flight path planning:
[0033] According to the specific application background and experimental requirements, the trajectory planning is carried out. The content of the trajectory planning includes the following points:
[0034] ●Flight track: set the coordinates of the waypoint: A1(x 1 ,y 1 ), A2(x 2 ,y 2 ), A3(x 3 ,y 3 )…An(x n ,y n ), where An is the set nth waypoint, (x n ,y n ) is the coordinate of the nth waypoint in the reference map, and each waypoint is connected by a straight line.
[0035] ●Flight speed: Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More