

Global positioning system (GPS) and machine vision-based integrated navigation and positioning system and method
A GPS positioning and machine vision technology, applied in the field of navigation and positioning, can solve the problems of unsuitable real-time operations in the field, poor real-time processing performance of algorithms, and high dimension of texture eigenvalues, so as to facilitate operations such as data dumping and data query. Program-friendly, jump-improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The integrated navigation and positioning system and method based on GPS and machine vision proposed by the present invention are described in detail below in conjunction with the accompanying drawings and embodiments.
[0043] The boundary between harvested and unharvested crops in the farmland is sometimes not a straight line. Using GPS alone for navigation has certain errors in determining the navigation reference line; machine vision can extract the characteristic information of the current crop row in real time when performing such operations, which improves the Positioning accuracy, but when machine vision is used alone, sometimes missed detection occurs during image processing, so the present invention combines GPS and camera sensors for navigation.
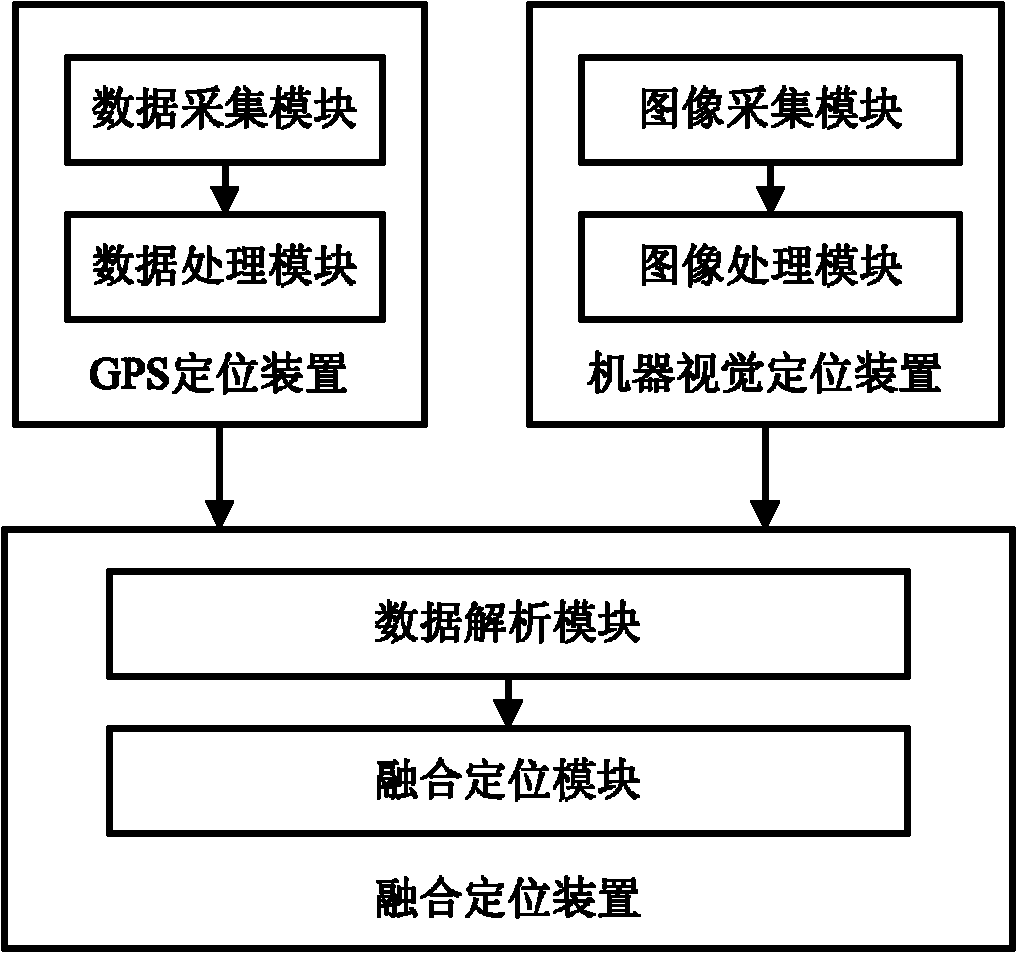
[0044] Such as figure 1 As shown, the integrated navigation and positioning system based on GPS and machine vision according to an embodiment of the present invention includes:
[0045]The GPS positioning device pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More