

Method for calibrating parameters of motor controller without position sensor
A motor controller and parameter calibration technology, which is applied in the direction of motor generator control, electronic commutation motor control, electromechanical brake control, etc., can solve problems such as limiting performance, time-varying parameters of permanent magnet synchronous motors, and cumbersome motor control systems. Achieve the effect of improving generality and solving the problem of unidentifiable parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
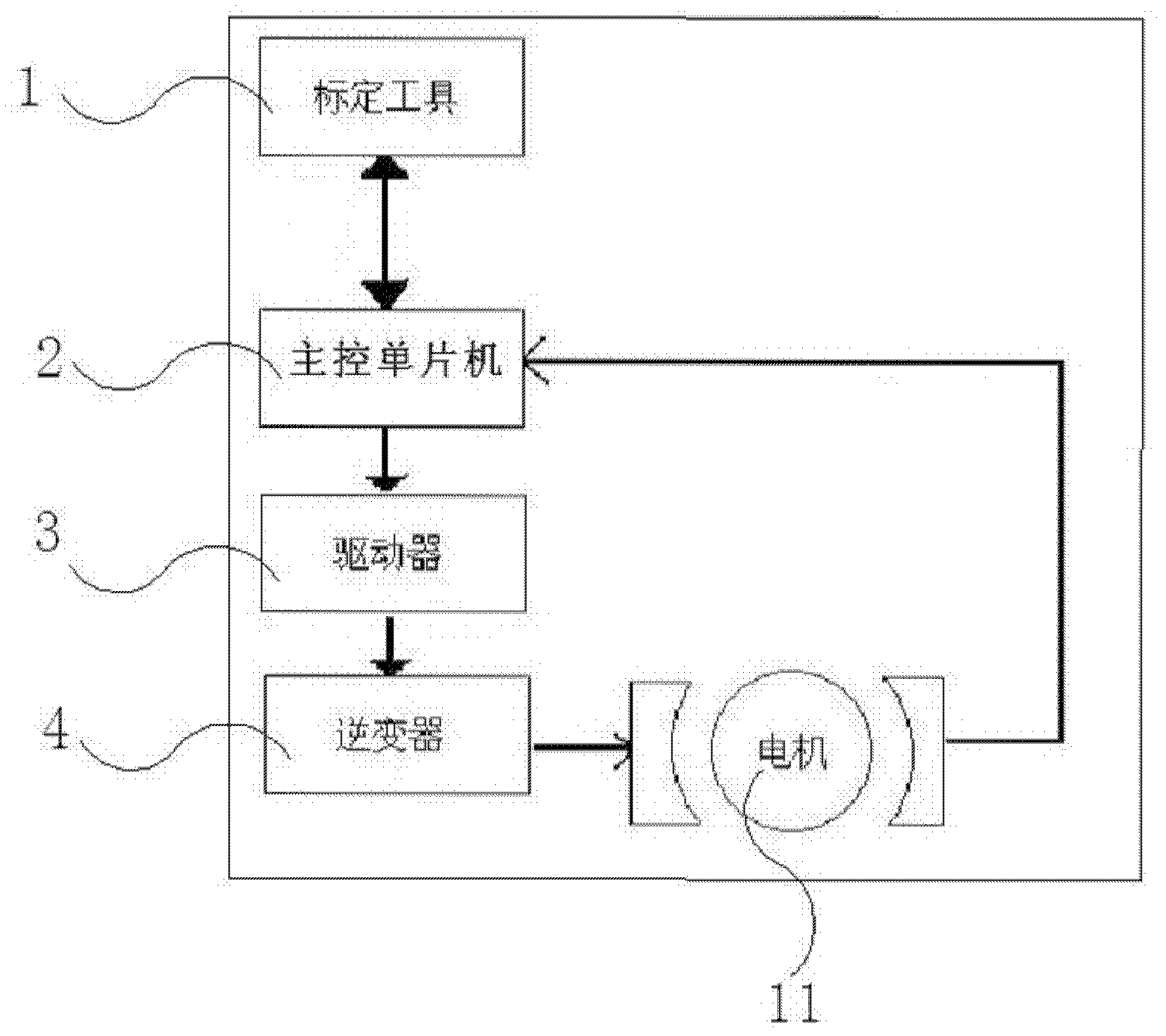
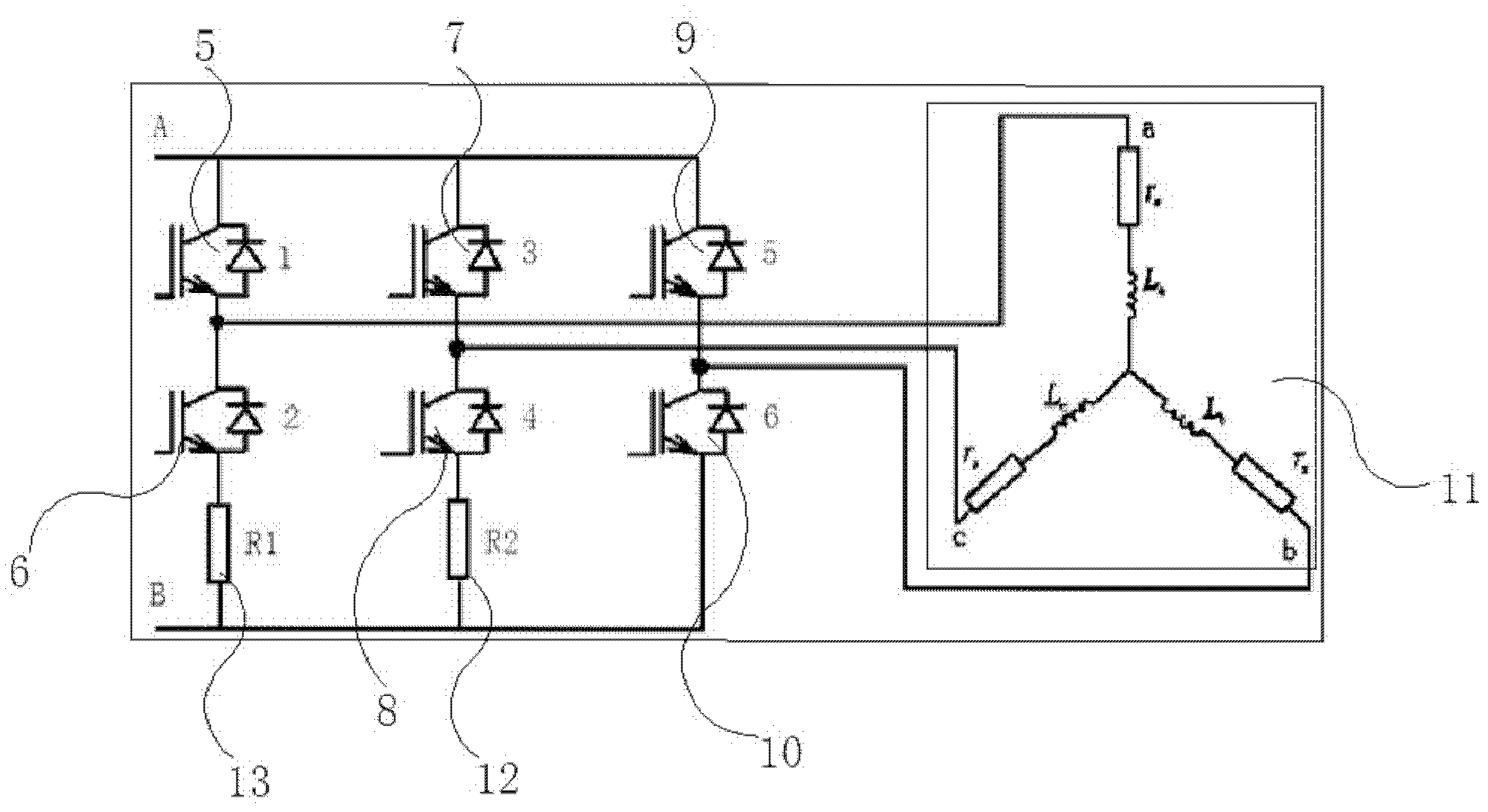
[0039] Such as figure 1 As shown, a sensorless motor controller parameter calibration method of the present invention, the system for realizing the calibration method includes a calibration tool 1, a main control microcontroller 2, a driver 3, an inverter body 4, and the first insulation of the inverter gate bipolar transistor 5, second insulated gate bipolar transistor 6, third insulated gate bipolar transistor 7, fourth insulated gate bipolar transistor 8, fifth insulated gate bipolar transistor 9, sixth insulated gate bipolar transistor Gate bipolar transistor 10, motor 11, first resistor 12 and second resistor 13, its specific steps are as follows:
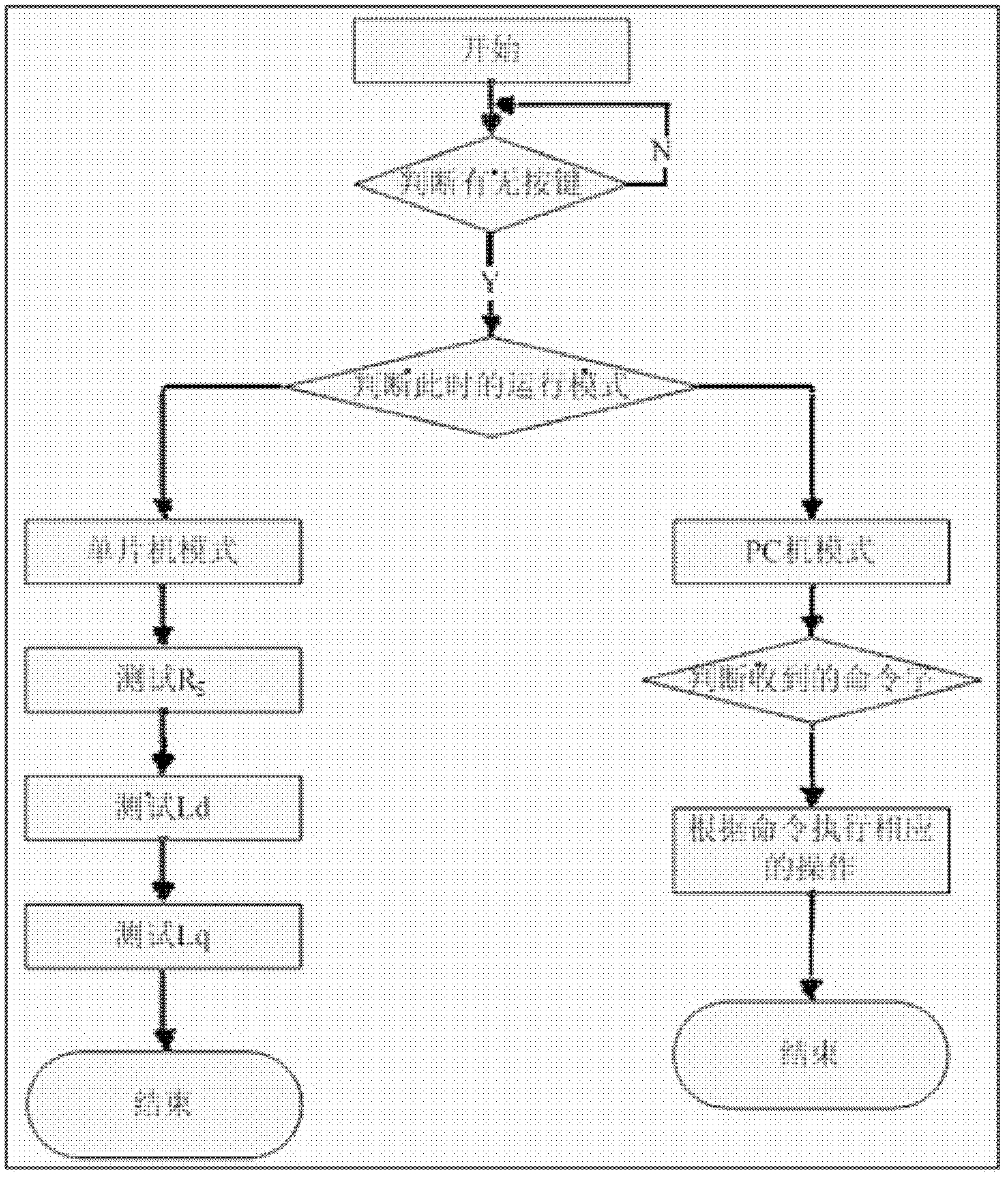
[0040] Step 1, the calibration tool 1 sends a calibration command to the main control microcontroller 2 through the controller local area network bus;
[0041] Step 2, the main control microc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More