Industrial robot demonstration planner with motion planning function and control method for industrial robot demonstration planner
An industrial robot and motion planning technology, applied in the direction of computer control, program control, general control system, etc., can solve the problems of large size, inconvenient operation, and many buttons, and achieve high-speed computing power, easy manipulation, and small size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples, but the embodiments of the present invention are not limited thereto.
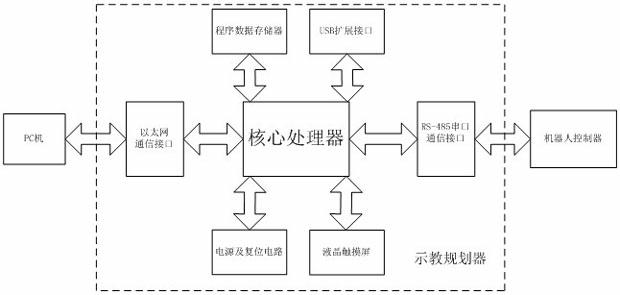
[0033] Such as figure 1 Shown, the present invention comprises core processor, program data memory, USB expansion interface, RS-485 serial port communication interface, Ethernet communication interface, power supply and reset circuit and liquid crystal touch screen; Core processor is connected with program data memory, USB expansion interface respectively , RS-485 serial communication interface, Ethernet communication interface, power supply and reset circuit are connected to LCD touch screen, the core processor adopts ARM9 embedded core processing chip, Ethernet communication interface is connected to PC, RS-485 serial communication interface is connected to robot Controller connection.
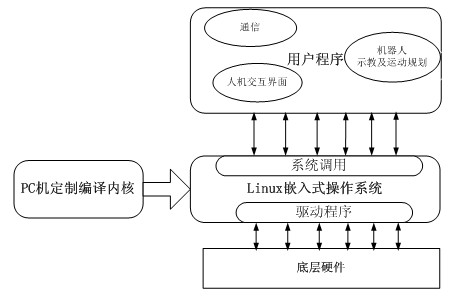
[0034] The core processing chip adopts an embedded operating system.
[0035] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com