Control method for moving mechanism of all-wheel-drive combined attracting-type wall-climbing robot
A crawling robot, composite adsorption technology, applied in the direction of manipulators, manufacturing tools, auxiliary welding equipment, etc., can solve the problems of being ahead, unable to solve the sensor, unable to fully drive the front wheel, etc., to achieve no additional delay, good response ability, good The effect of tracking performance in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
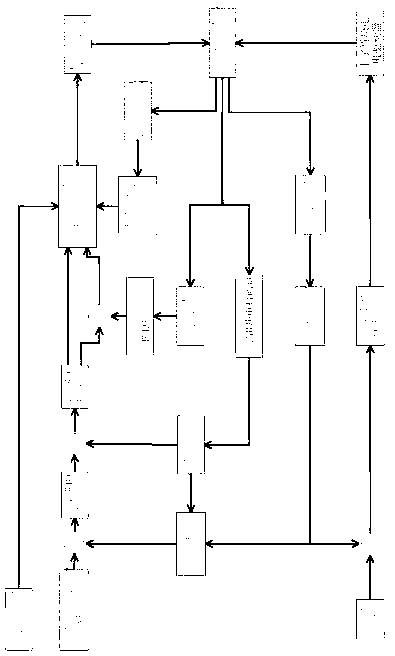
[0042] A control method for the motion mechanism of a fully-driven composite adsorption crawling robot. The control object of this method is a crawler that uses a laser seam tracking sensor as a seam tracking sensor, and a cross slider as an actuator drive wheel differential, and a steering wheel fully driven crawler Type welding robot, the specific steps are:
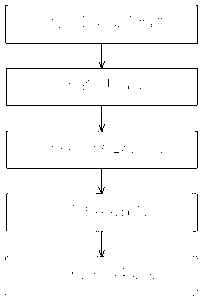
[0043] A. Obtain the two-dimensional welding seam position information provided by the seam tracking sensor, and perform filtering processing; the equipment used in step A is a data filter, and the filtering processing method in step A is: compare the current value with a certain amount of historical data Make an estimate, and make data judgments based on the estimated value and error threshold to remove the error data.
[0044] The steps of the filtering method are as follows: According to the historical data of at least the first 10 cycles, the sliding window smoothing filter method is used to calculate the estimated data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com