

Active-type automatic deviation rectification device of pipe-jacking tunneling machine
A technology of automatic deviation correction device and pipe jacking machine, which is applied to mining equipment, earthwork drilling, tunnels, etc., can solve problems affecting the quality of pipe jacking construction, input errors in operation instructions, and many undesired movements, etc., to reduce soil The effect of layer restraint reaction force, small deviation correction control force and small number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
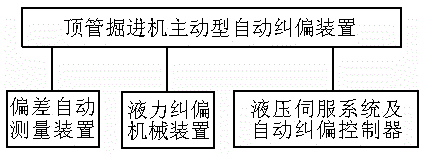
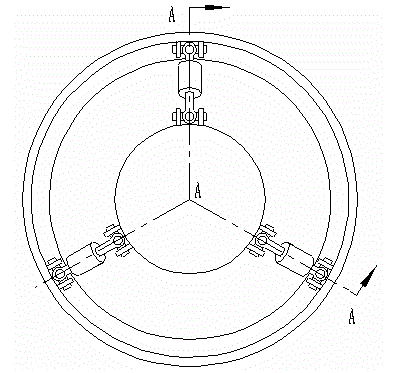
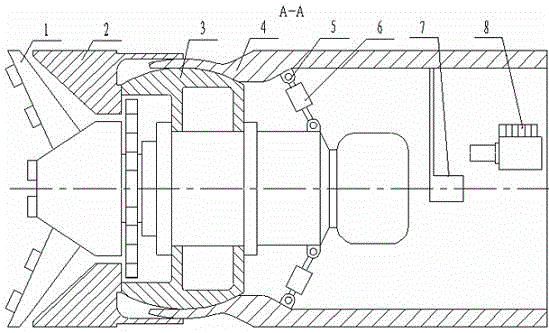
[0028] Specific implementation mode one: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 As shown, the active automatic deviation correction device of the pipe jacking machine is composed of an automatic deviation measurement device 7 , a hydraulic deviation correction mechanical device, a hydraulic servo system and an automatic deviation correction controller 8 .
[0029] The automatic measurement device for deviation is selected from the existing automatic measurement device for single laser target or automatic measurement device for single laser target + gyroscope, which is suitable for straight line excavation engineering; the working process of the automatic measurement device for single laser target is as follows: The laser light source is set on the base point, so that the laser beam is incident on the light target set on the head of the roadheader along the design axis, and the camera acquires the image of the light target in real time, so as...
specific Embodiment approach 2
[0033] Specific implementation mode two: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 7 , Figure 8 , Figure 9 As shown, the difference between this embodiment and Embodiment 1 is that the automatic deviation measurement device selects the automatic remote measurement system for pipe jacking in curves, so as to be suitable for curve excavation projects; The star measurement system at the end point is composed. The surveyor obtains the initial pose of the automatic measurement device through the starting point measurement system and inputs it into the hydraulic servo system and the automatic deviation correction controller 8. The automatic measurement device used in the operation measurement system is a running trolley. The gyroscope is mainly installed on the car to measure the pitch angle, horizontal azimuth angle and rotation angle of the running trolley in real time, combined with the speed of the running trolley measured by the electronic speedometer, the...
specific Embodiment approach 3
[0034]Specific implementation mode three: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 As shown, the difference between this embodiment and the first and second embodiments is that the servo hydraulic cylinder 6 is driven in parallel by a plurality of synchronous hydraulic cylinders, which is suitable for occasions requiring a large driving force for deviation correction.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More