3D gesture recognition controller and method based on ultrasonic locating
A technology of gesture recognition and ultrasonic positioning, which is applied in the program control of sequence/logic controller, electrical program control, user/computer interaction input/output, etc. Depth information and other issues can achieve the effect of stable gesture position and improved solution speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solution and advantages of the patent of the present invention clearer, the patent of the present invention will be further described in detail below in conjunction with the accompanying drawings.
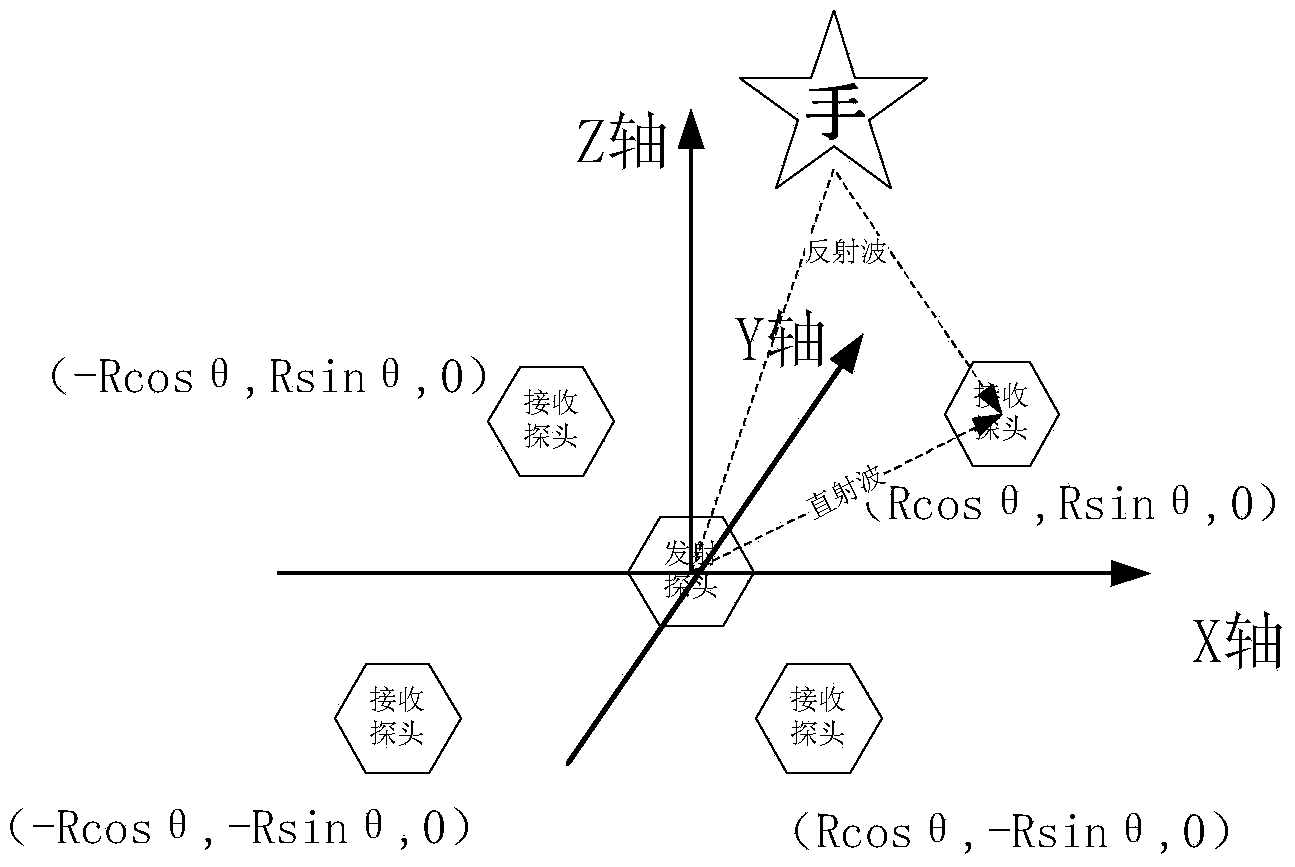
[0033] The present invention provides a 3D gesture recognition controller based on ultrasonic positioning, the controller includes: a signal acquisition circuit and a positioning and identification unit;
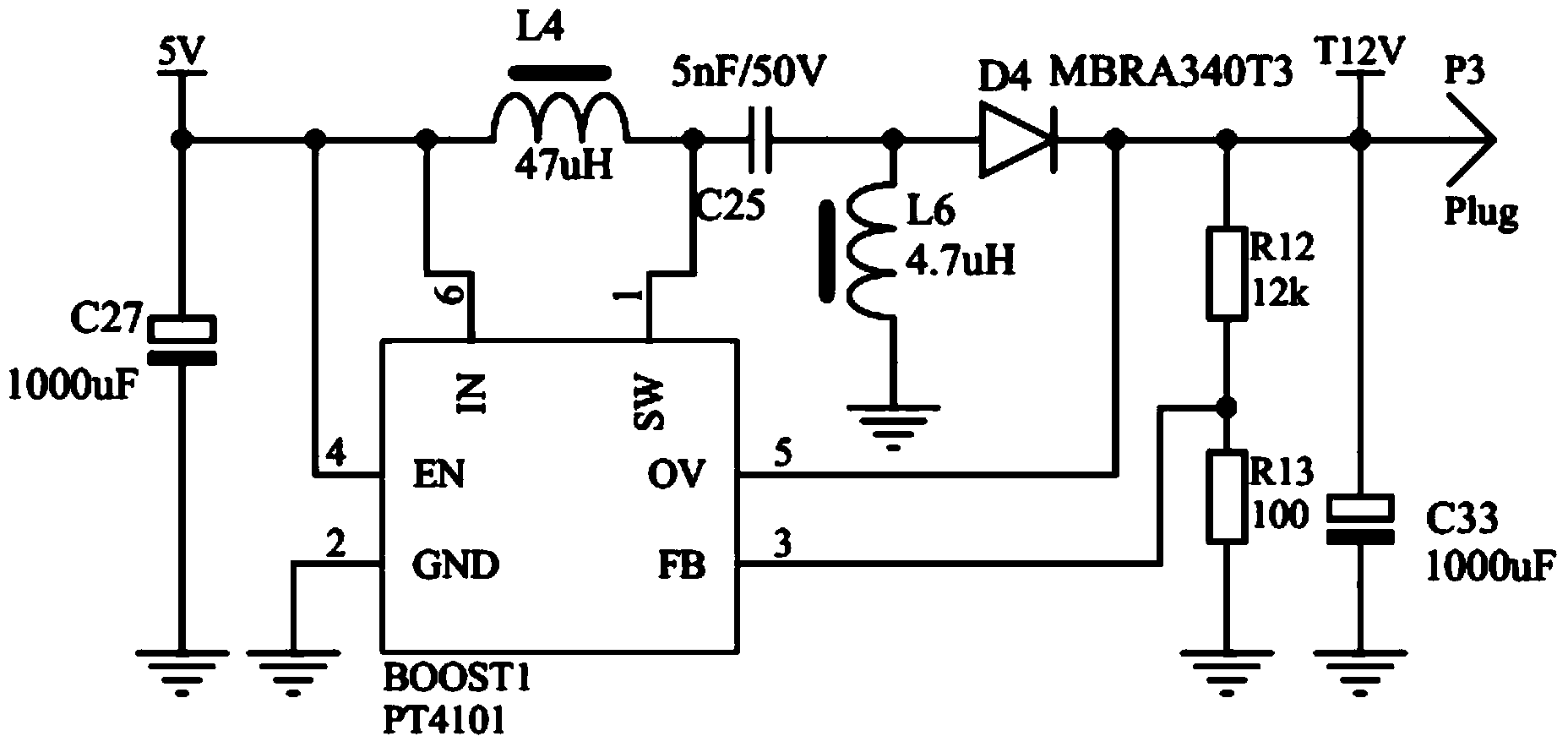
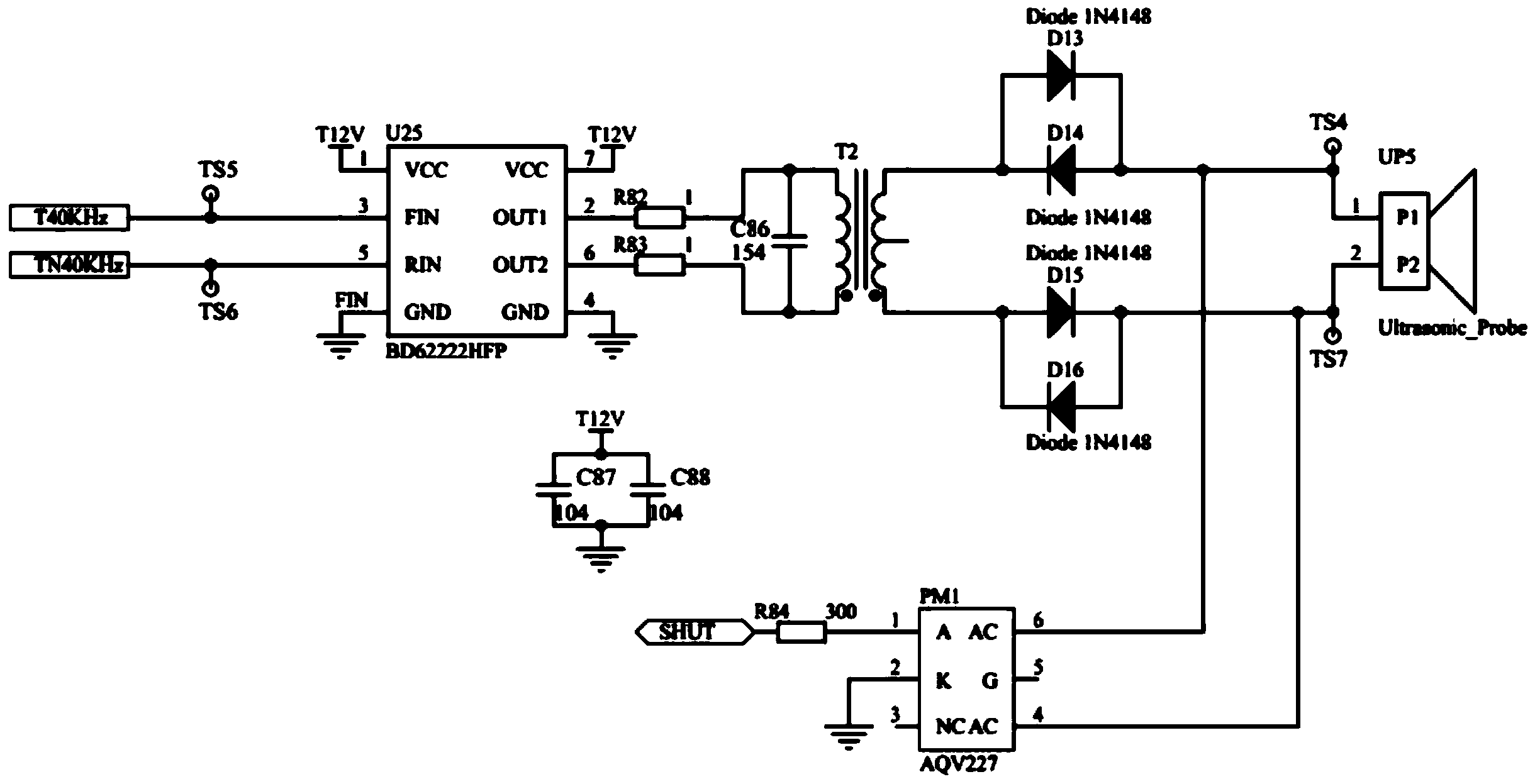
[0034] Signal acquisition circuit, including ultrasonic transceiver array, transmitting circuit, receiving circuit and boost power supply;
[0035] Positioning and recognition unit, including position measurement unit and gesture recognition unit;
[0036] The position measurement unit includes a closed receiving probe, which is used to collect the ultrasonic background signal and the emitted ultrasonic signal, and obtain the measurement signal through the emitted ultrasonic signal and the ultrasonic background signal; and
[0037] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com