One-axis stepping and three-axis linkage space curved surface milling method
A three-axis linkage and curved surface technology, which is applied in metal processing equipment, milling machine equipment, manufacturing tools, etc., can solve the problems of shape accuracy and surface quality machining, difficulty in controlling the curved surface of machining tool workpieces, and different cutting speeds for removal volume, etc., to achieve The effect of stable surface quality, improved surface quality, and efficient continuous cutting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
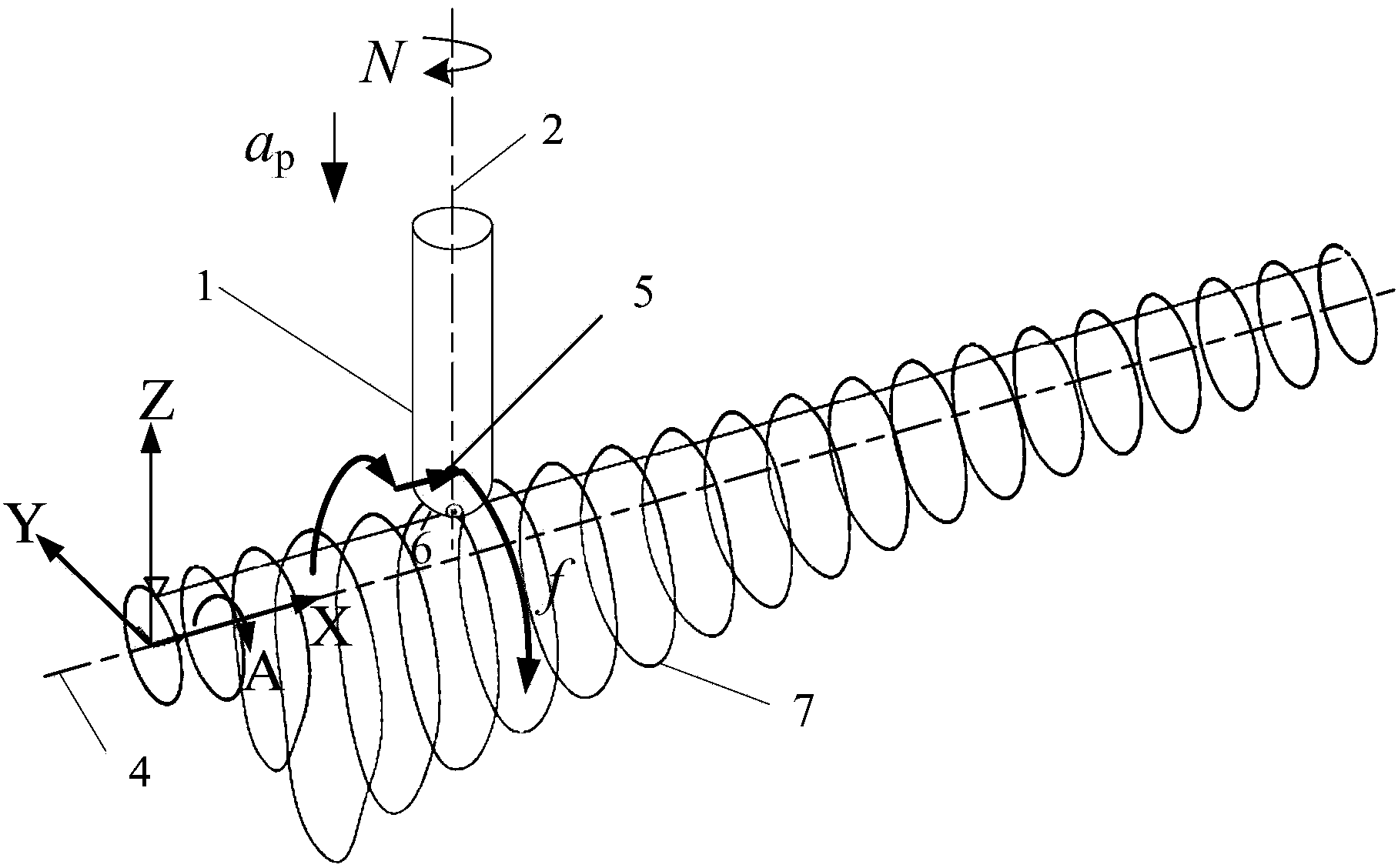
[0019] A 4-axis machining center (VMC850L) is adopted, the main axis is the Z axis, which can interpolate up and down, the workbench can interpolate horizontally on the X axis and the Y axis, and the A axis indexer is installed on the workbench, and the axis line of the A axis is aligned with the X axis. Axis coincidence, can be used for interpolation rotation. A spherical milling cutter 1 with a radius of 4mm is installed on the axis 2 of the milling machine. The material of the milling cutter is SMG tungsten steel with Al-Ti-N coating. The workpiece 3 (artificial hip joint prosthesis handle) is 7075 aluminum-zinc-magnesium-copper It is a high-strength aluminum alloy with a hardness of HRC55, a length of 420mm, and a diameter of 100mm. It is installed on the A-axis indexer. The center line of the workpiece 3 coincides with the axis line of the A-axis. The processed space surface is designed as a three-dimensional artificial hip joint prosthesis handle. model, such as figure ...
Embodiment 2
[0021] A 4-axis machining center (HASS VF-2) is adopted, the Z-axis of the main shaft can interpolate up and down, the worktable can interpolate horizontally with the X-axis and Y-axis, the A-axis indexer is installed on the worktable, and the axis line of the A-axis is in line with the The X-axis coincides and can be used for interpolation rotation. A spherical milling cutter with a radius of 5mm is installed on the main shaft 2. The material of the milling cutter is cBN. The workpiece 3 (artificial hip joint prosthesis handle) is SKD11 die steel with a hardness of HRC55. It is 420mm long and 100mm in diameter. It is installed on the A-axis indexer. The line coincides with the axis line of the A axis, and the processed space surface is designed as a three-dimensional model of the artificial hip joint prosthesis handle, such as figure 1 shown. First, along the Z-axis direction, the upper and lower curved surface parts are divided into 4 parts by the center line of the workpie...
Embodiment 3
[0023] A 4-axis machining center (HASS VF-2) is adopted, the Z-axis of the main shaft can interpolate up and down, the worktable can interpolate horizontally with the X-axis and Y-axis, the A-axis indexer is installed on the worktable, and the axis line of the A-axis is in line with the The X-axis coincides and can be used for interpolation rotation. A spherical milling cutter with a radius of 3mm is installed on the spindle 2, the material of the milling cutter is PCD, and the workpiece 3 (artificial hip joint prosthesis handle) is titanium alloy, with a length of 380mm and a diameter of 100mm, and is installed on the A-axis indexer. The axis lines coincide, and the processed space surface is designed as a three-dimensional model of the artificial hip joint prosthesis stem, such as figure 1shown. First, along the Z-axis direction, the upper and lower curved surface parts are divided into 4 parts by the centerline of the workpiece for rough machining, and the amount of axial ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More