

Inverse-kinematics universal solving method of robot with multi-degree of freedom
A technology of inverse kinematics and kinematic equations, applied in the field of modeling methods and weighted space vector projection methods, can solve problems such as inconsistency and non-universality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in more detail below in conjunction with the accompanying drawings.
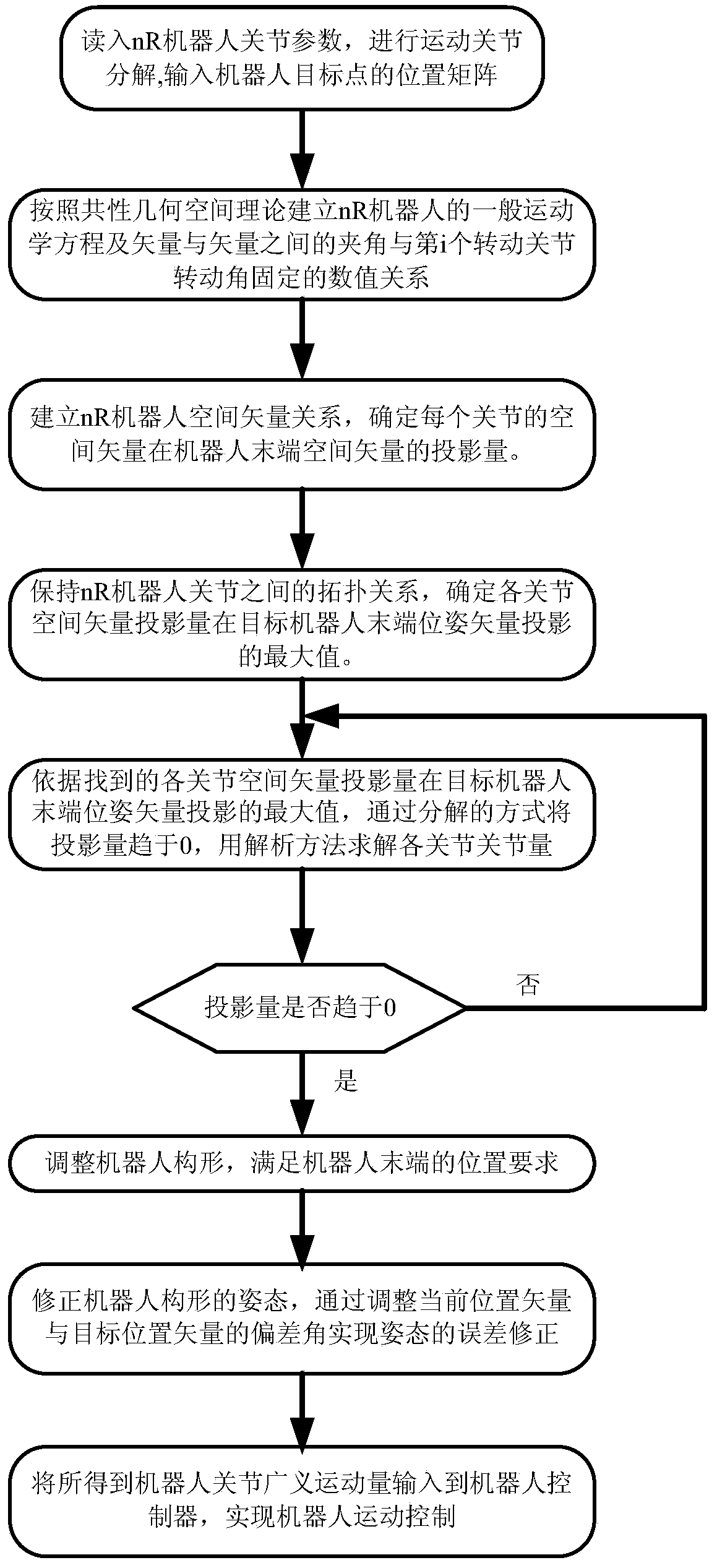
[0055] The main solution process is as follows figure 1 shown.
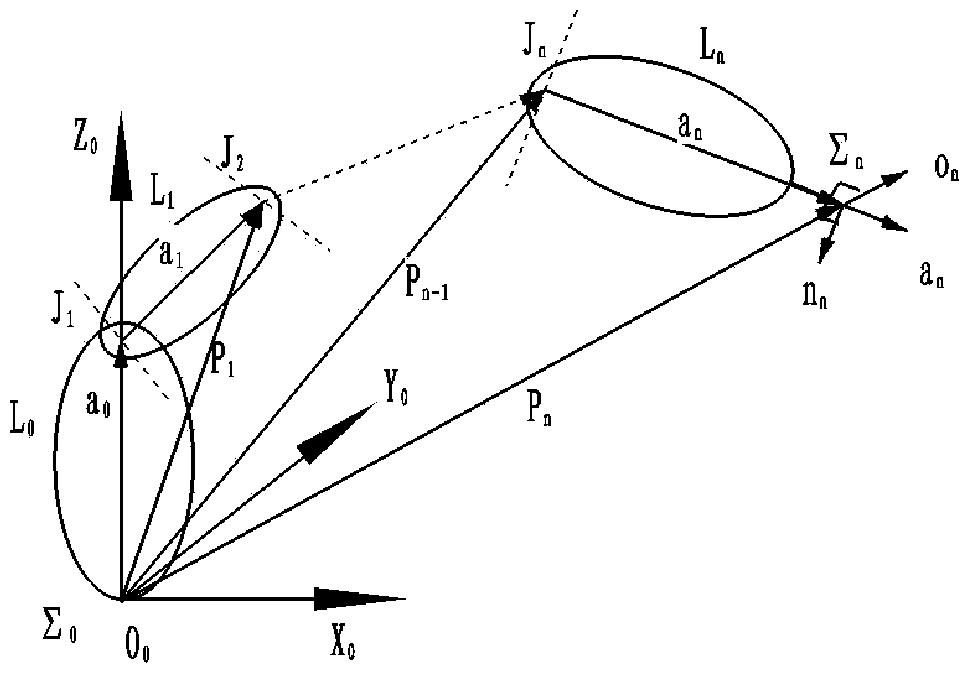
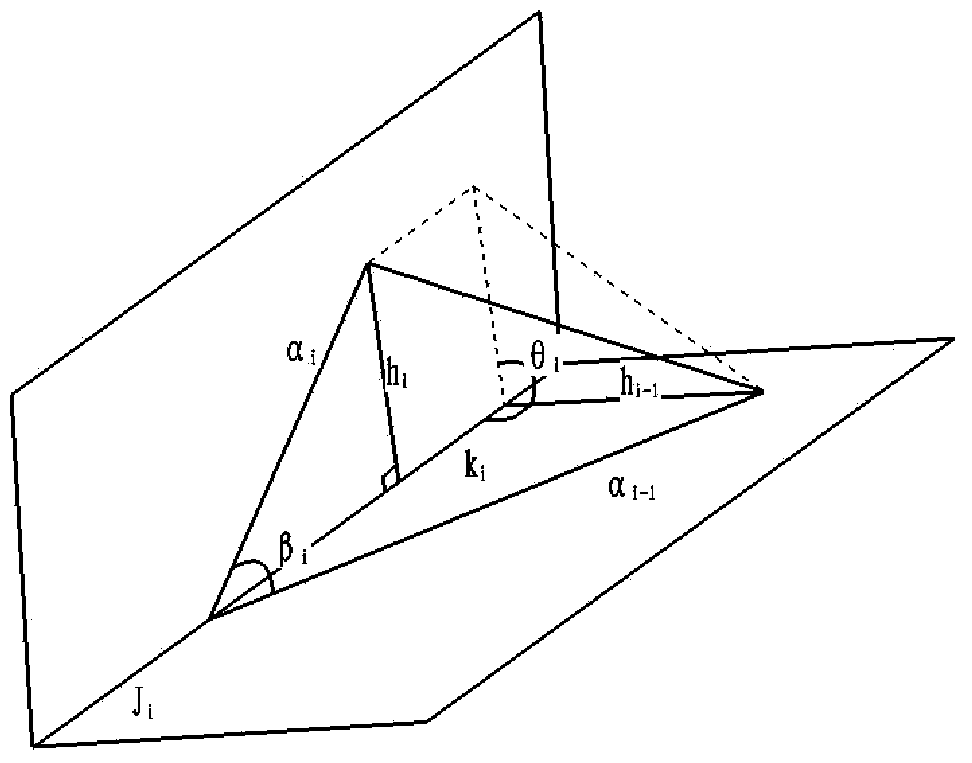
[0056] The general kinematics model of the nR robot used is attached figure 2 As shown, it consists of a rotational joint with n degrees of freedom and a rigid body link. attached figure 2 Medium, J i (i=1,2...n) is the center of the i-th rotary joint; L i (i=0,1,2...n) is the i-th rigid body; Σ i (i=1,2...n) is L i fixed coordinate system, Σ 0 is the base coordinate system; a i (i=0,1,2...n) is the vector from the center of the i-th revolving joint to the center of the i+1-th revolving joint. Since the joint parameters are fixed, the vector a i-1 with vector a i Angle β between i Rotation angle θ with the i-th revolving joint i Fixed numerical relationship, vector a i The norm of the rigid body L i The shape determination is a fixed number, and its change is related to the rotation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More