Ground-based simulation system for space robot visual servo to capture moving target and simulation method
A space robot and ground simulation technology, applied in the field of space robots, can solve the problem of unable to simulate the capture of moving target satellites, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
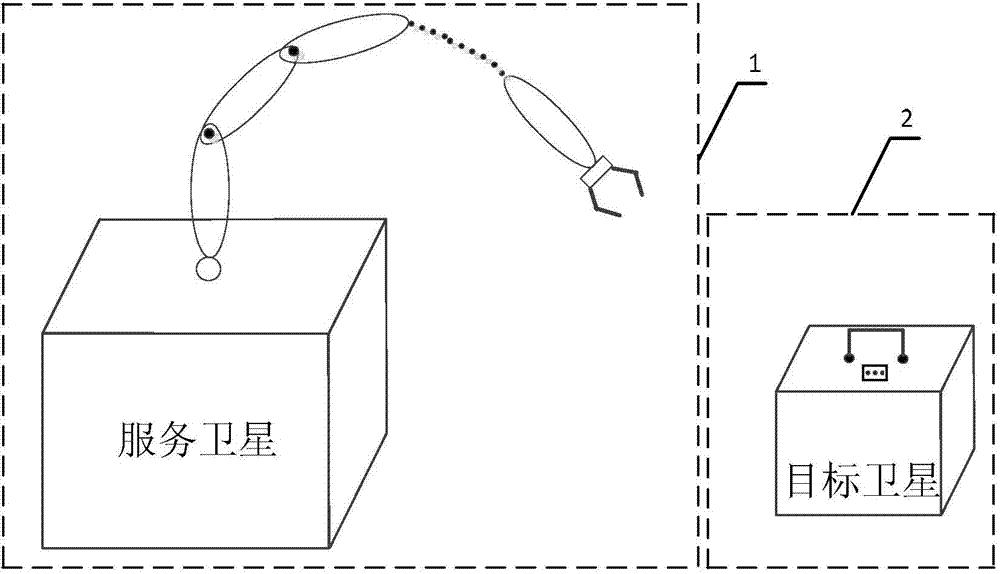
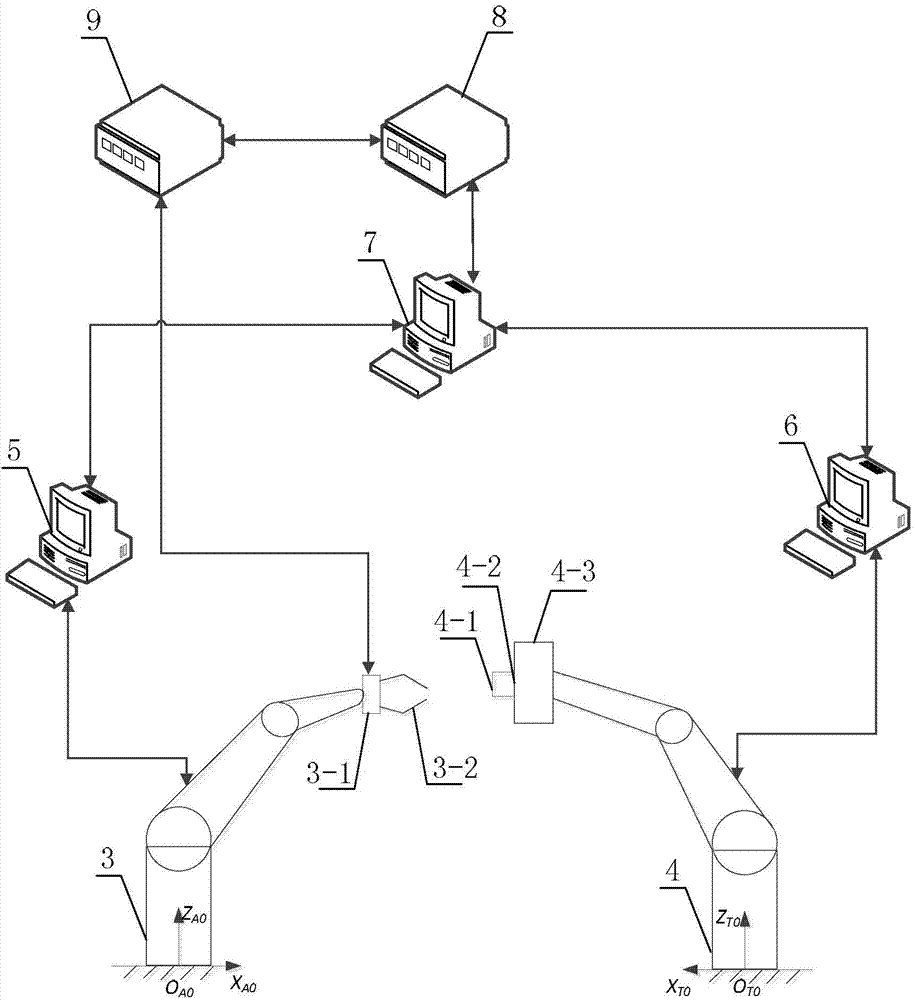
[0030] Specific embodiment one: combination Figure 1 to Figure 4 To illustrate this embodiment, the ground simulation system for space robot visual servo capture of moving targets described in this embodiment includes the No. 1 industrial robot 3, the No. 2 industrial robot 4, motion control and space robot end kinematics equivalent computer 5, motion control Kinematics equivalent computer 6, dynamics computer 7, space robot joint electric simulator 8 and central controller 9 with the target satellite handle;
[0031] The first industrial robot 3 is used to simulate the movement of the end of the space manipulator of the service satellite 1 with a floating base; the second industrial robot 4 is used to simulate the movement of the target satellite 2, and the second industrial robot 4 is equipped with a target satellite A simulator 4-3, the target satellite simulator 4-3 is located between the mechanical arm of the industrial robot 4 and the visual target 4-2;
[0032] The relative...
specific Embodiment approach 2
[0043] Specific implementation manner two: combination Figure 2 to Figure 4 To illustrate this embodiment, this embodiment is a further limitation to the ground simulation system for space robot visual servo capturing moving targets described in Embodiment 1. In this embodiment, the dynamics computer 7 communicates via TCP / IP network. Data transmission is performed between the motion control and space robot terminal kinematics equivalent computer 5 and the motion control and target satellite handle kinematics equivalent computer 6.
[0044] In this embodiment, the simulation part of the ground industrial robot adopts the TCP / IP network communication mode to ensure the real-time performance of the system.
specific Embodiment approach 3
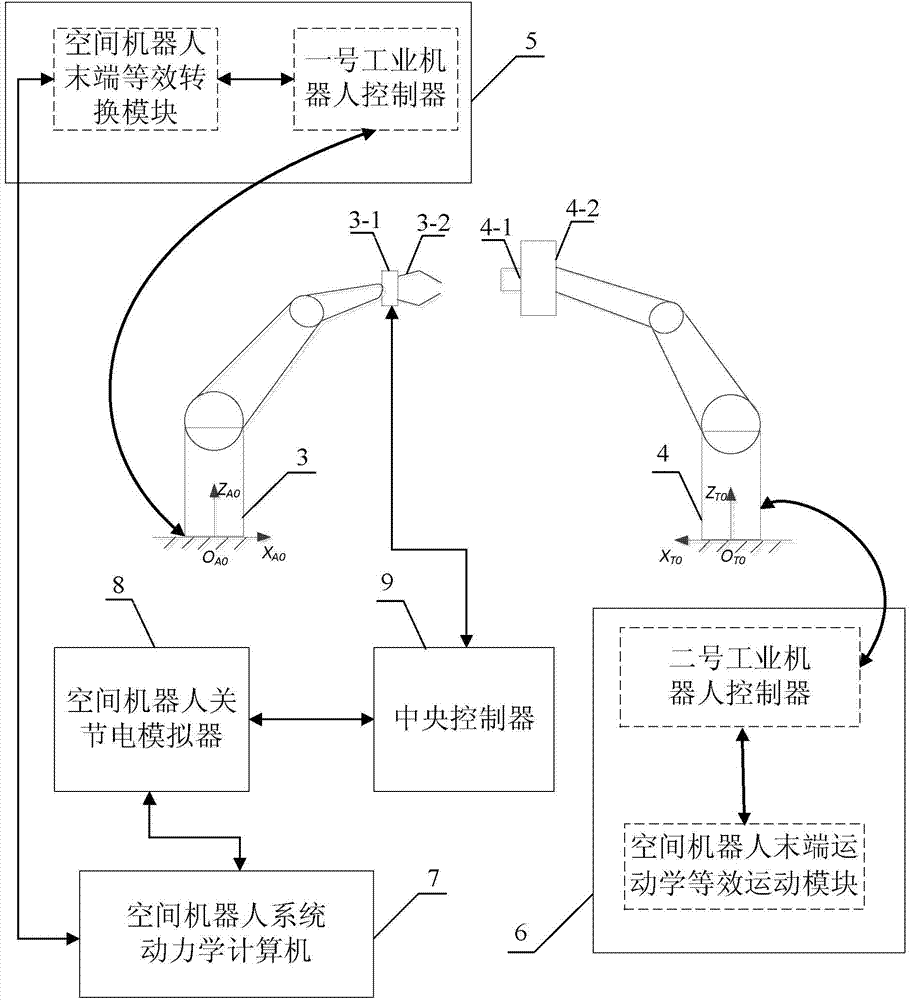
[0045] Specific implementation mode three: combination image 3 To illustrate this embodiment, this embodiment is a further limitation to the ground simulation system of the space robot's visual servo capture of moving targets described in the first embodiment. In this embodiment, the motion control and the end kinematics of the space robot are equivalent to a computer 5 Embedded with the space robot terminal equivalent conversion module and the No. 1 industrial robot controller realized by software.
[0046] In this embodiment, the dynamics computer 7 calculates the base pose and joint angle information of the space robot according to the control torque of the space robot, and sends the base pose and joint angle information to the motion control and end motion of the space robot through the TCP / IP protocol. Learn the equivalent conversion module of the end of the space robot in the equivalent computer 5. The end equivalent conversion module of the space robot first obtains the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More