

Indoor simultaneous locating and environment modeling method for unmanned aerial vehicle
A technology of unmanned aerial vehicle and indoor environment, which is applied in the field of robot indoor positioning and three-dimensional environment modeling, which can solve the problems of slight vibration, error, large error in motion calculation, etc., and achieve the effect of saving time, good controllability and strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
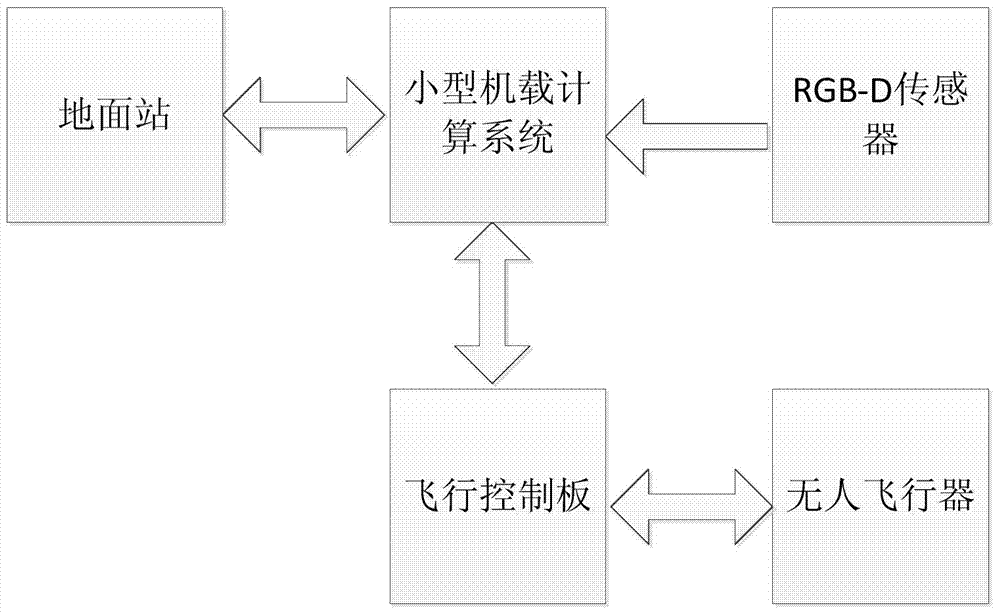
[0035] First, we pass figure 1 Carry out overall construction to the system hardware involved in the present invention. In the process of platform construction, the principle of minimum load should be followed to ensure that the unmanned aerial vehicle can obtain a relatively stable and flexible flight attitude in the indoor space, so that we can carry out the next data collection and calculation work.
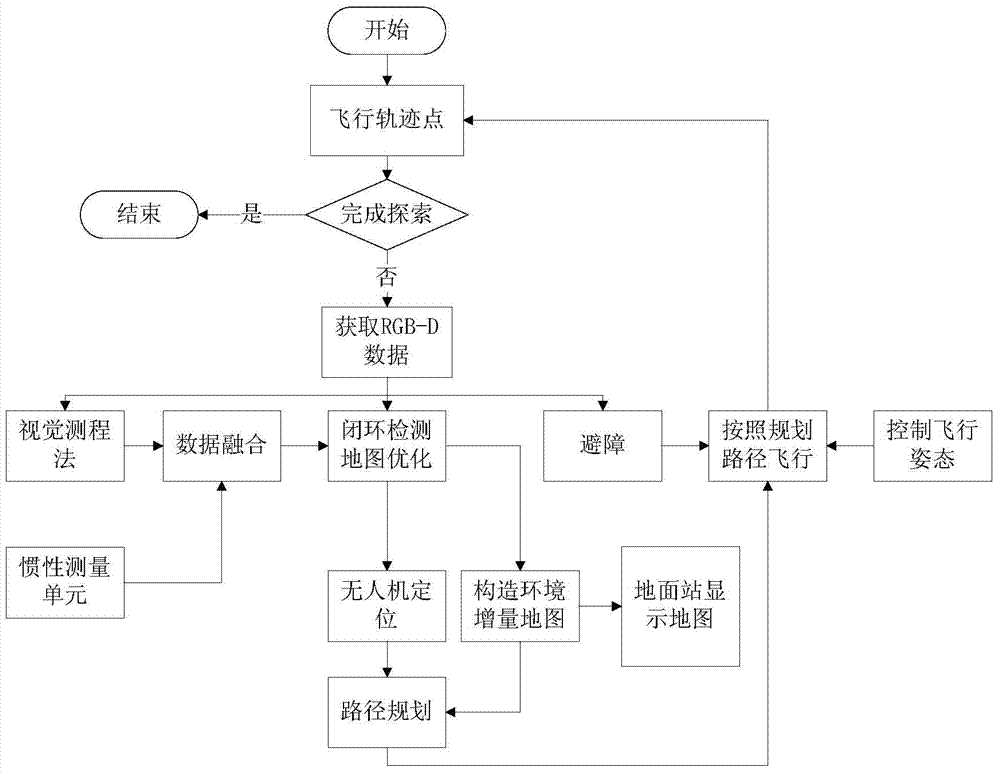
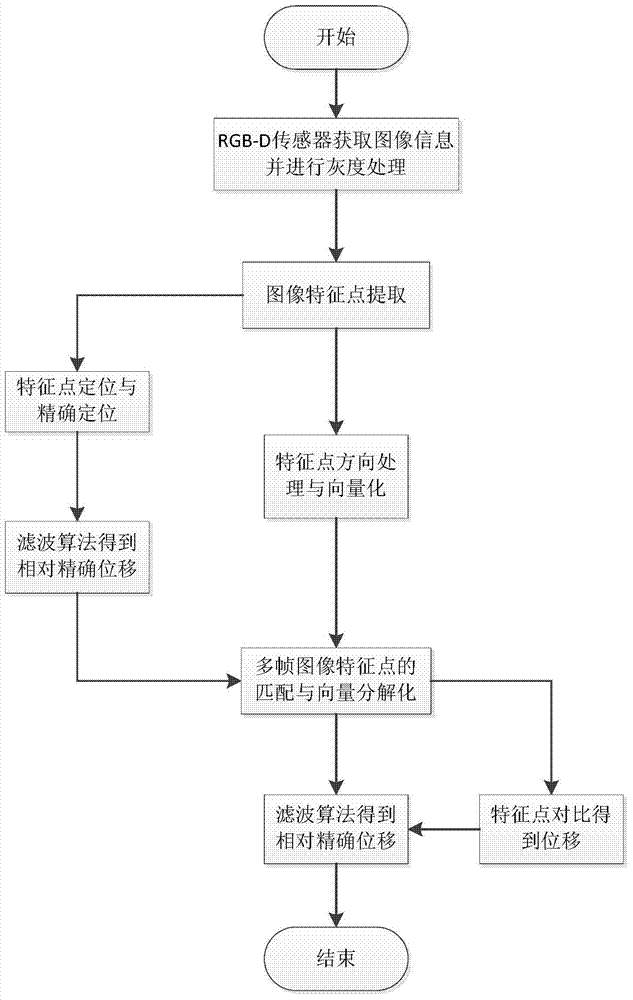
[0036] next use figure 2 The system software framework shown builds the UAV software system, uses the RGB-D sensor mounted on it to collect external data, and uses the visual odometry method to calculate and filter the route trajectory and displacement of the UAV flying indoors , so as to obtain relatively more accurate flight data of the aircraft. Furthermore, we use the data transmission function of the unmanned aerial vehicle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More