

Method for performing position servo driving on electro-hydraulic proportional valve based on hybrid control
An electro-hydraulic proportional valve and hybrid control technology, applied to electric controllers, controllers with specific characteristics, etc., can solve problems such as high control accuracy, difficulty in achieving nonlinear systems, and inability to perform parameter compensation, so as to overcome system parameters. Drift, improve the effect on commands
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
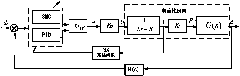
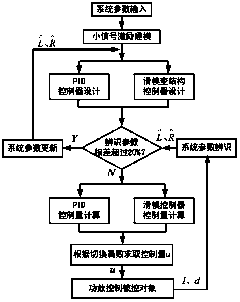
[0040] Specific implementation mode 1. Combination figure 1 , 2 And 3 illustrate this specific embodiment, a kind of electro-hydraulic proportional valve position servo drive method based on hybrid control, and it is realized by the following steps:
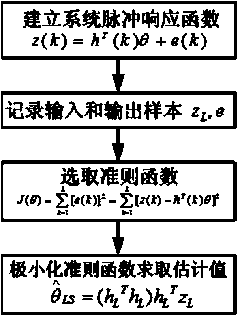
[0041] (1) The mathematical model of the electro-hydraulic proportional valve is established, including the system transfer function and state equation, which are used in the design of PID and sliding mode variable structure controllers respectively. The models are shown in formula 1 and formula 2.
[0042] System transfer function:
[0043] G p ( s ) = K Ls + R × 1 Ms + N - - - ( 1 )
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More