

Rehabilitation robot control system and method
A rehabilitation robot and control system technology, applied in electrical program control, program control in sequence/logic controllers, passive exercise equipment, etc. Control and other issues to achieve the effect of improving reliability and ease of maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that what is described here is only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
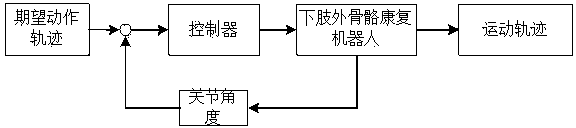
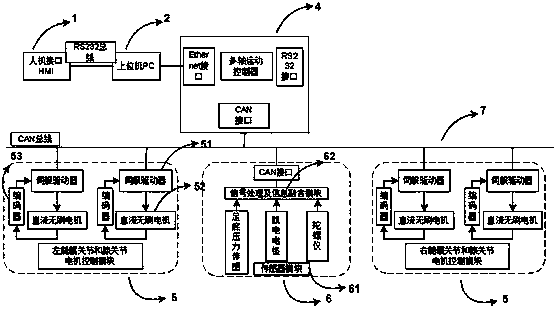
[0051] One of the purposes of the embodiments of the present invention is to provide a rehabilitation robot control system, such as figure 1 As shown, the control goal of the lower extremity exoskeleton rehabilitation robot control system is to output the motion trajectory of the legs to help or drive the patient to perform rehabilitation training, which specifically includes the following parts:
[0052] Man-machine interf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More