

Motion collecting and feedback method and system based on stereoscopic vision
A technology of stereo vision and motion acquisition, applied in the input/output of user/computer interaction, mechanical mode conversion, computer components and other directions, can solve the problems of accurate stability and cannot be solved at the same time, and achieves improved control experience, Low hardware cost and stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
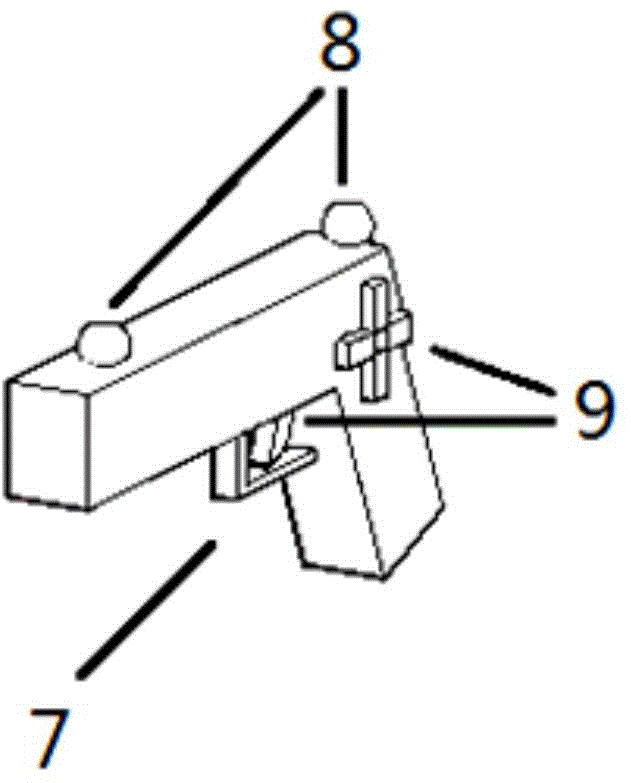
[0042] Embodiment 1 of the present invention: a kind of action collection and feedback method based on stereo vision, such as Figure 7 As shown, it includes the following steps: collecting the spatial position of the infrared light source on the accessory device 14 in the front space: the dual camera device 1 fixed in front of the head-mounted display 2 collects the image data ahead through the CMOS or CCD sensors 18 on the left and right sides, This image data becomes digital signal after A / D converter 19 and enters DSP processor 20, carries out exposure, gain, white balance processing; The digital signal after processing enters in encoding chip 21 and carries out signal encoding; After encoding, two road video signals Enter the data bus 22 to synthesize one road and output to the computer 15 through the USB data line that the double camera device 1 carries; value; convert the coordinate value of the infrared light source collected by each lens into the azimuth angle of the ...
Embodiment 2
[0043] Embodiment 2: realize the action collection and feedback system based on stereo vision of the method described in embodiment 1, as Figure 8 As shown, it includes: a dual camera device 1, a base 11, an accessory device 14 and a computer 15, and the base 11 (such as Figure 4 Shown) is provided with A bluetooth module 16 and USB data line 13, and USB data line 13 is connected with computer 15; Described accessory device 14 is provided with B bluetooth module 17, and B bluetooth module 17 is wirelessly connected with A bluetooth module 16 ; Dual camera device 1 is connected with computer 15; Described accessory device 14 is glove-shaped accessory device 3 (as Figure 5 As shown), the glove-shaped accessory device 3 is also provided with an infrared LED 8, a vibration module 4 and a drive box 5, and the drive box 5 is connected to the A Bluetooth module 16 and the vibration module 4 respectively; the dual camera device 1 includes: CMOS or CCD sensor 18, A / D converter 19, ...
Embodiment 3
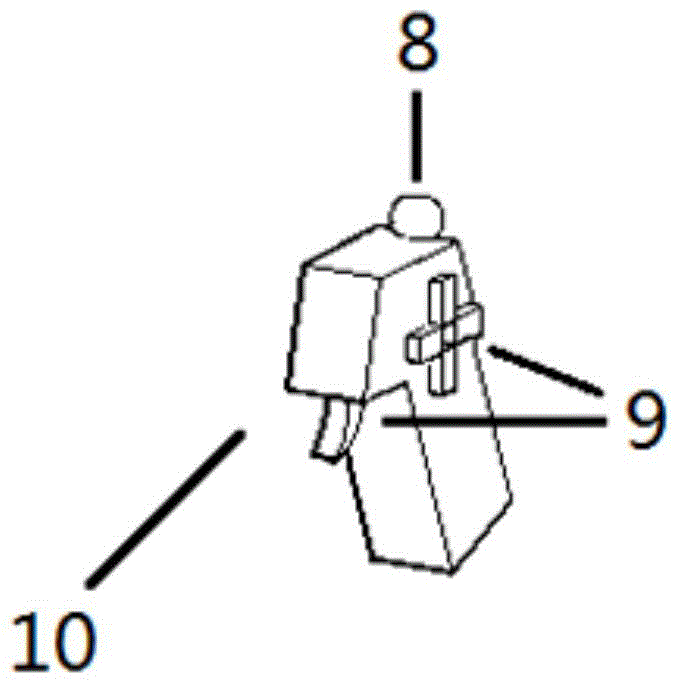
[0044] Embodiment 3: realize the action collection and feedback system based on stereo vision of the method described in embodiment 1, as Figure 9 As shown, it includes: a dual camera device 1, a base 11, an accessory device 14 and a computer 15, and the base 11 (such as Figure 4 Shown) is provided with A bluetooth module 16 and USB data line 13, and USB data line 13 is connected with computer 15; Described accessory device 14 is provided with B bluetooth module 17, and B bluetooth module 17 is wirelessly connected with A bluetooth module 16 ; Dual camera device 1 is connected with computer 15; Described accessory device 14 is finger ring accessory device 6 (as figure 1 shown), means that the ring-shaped accessory device 6 is also provided with an infrared LED 8; the dual camera device 1 includes: CMOS or CCD sensor 18, A / D converter 19, DSP processor 20 and encoding chip 21, CMOS or CCD Sensor 18, A / D converter 19, DSP processor 20 and coding chip 21 are connected in seque...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More