

A control device and method for a stepping motor
A technology of stepper motor and control method, applied in the direction of motor generator control, control system, electrical components, etc., can solve the problems of decreased motion accuracy, inconvenient operation, low control accuracy, etc., to improve stability and accuracy, avoid Inconvenience factors, the effect of avoiding adverse factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
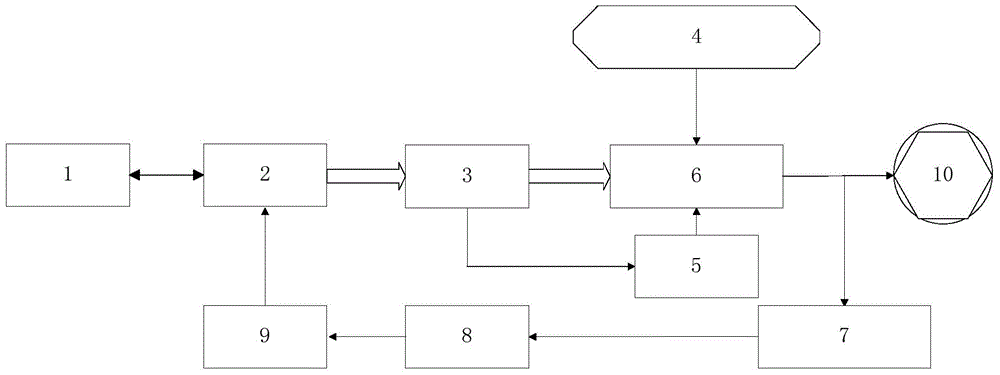
[0045] Such as figure 1 As shown, the present invention includes a computer 1, a single-chip microcomputer 2, a control signal photoelectric isolation circuit 3, a linear unstabilized power supply 4, an output current control circuit 5, a drive circuit 6, a winding current acquisition circuit 7, a reference voltage comparison circuit 8, and a feedback signal Photoelectric isolation circuit 9;
[0046]The computer 1 is connected to the single-chip microcomputer 2; the output end of the single-chip microcomputer 2 is connected with the control signal input end of the drive circuit 6 and the input end of the output current control circuit 5 after being isolated by the control signal photoelectric isolation circuit 3; the output end of the output current control circuit 5 Be connected with the current signal input end of drive circuit 6; The output end of drive circuit 6 is connected with the input end of stepper motor 10 and the input end of winding current acquisition circuit 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More