

Nonsingular terminal sliding mode flight path control method for airships
A non-singular terminal, control method technology, applied in the field of automatic control, can solve problems such as convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
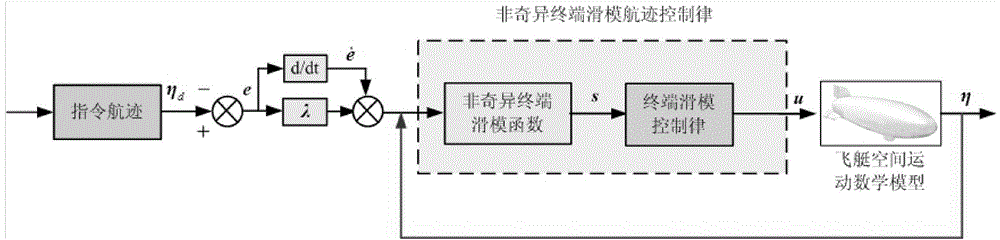
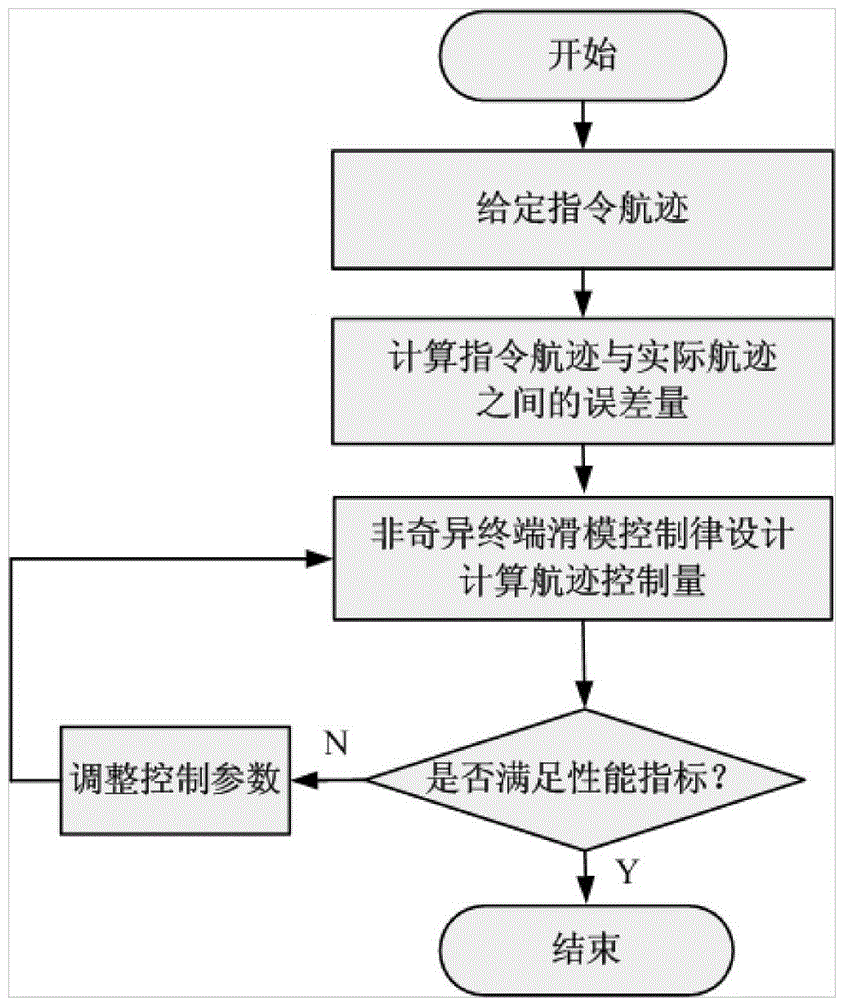
[0095] With reference to accompanying drawing, a kind of airship non-singular terminal sliding mode track control method of the present invention is introduced in detail, and its specific steps are as follows:
[0096] Step 1: Given command track
[0097] The given command track is:
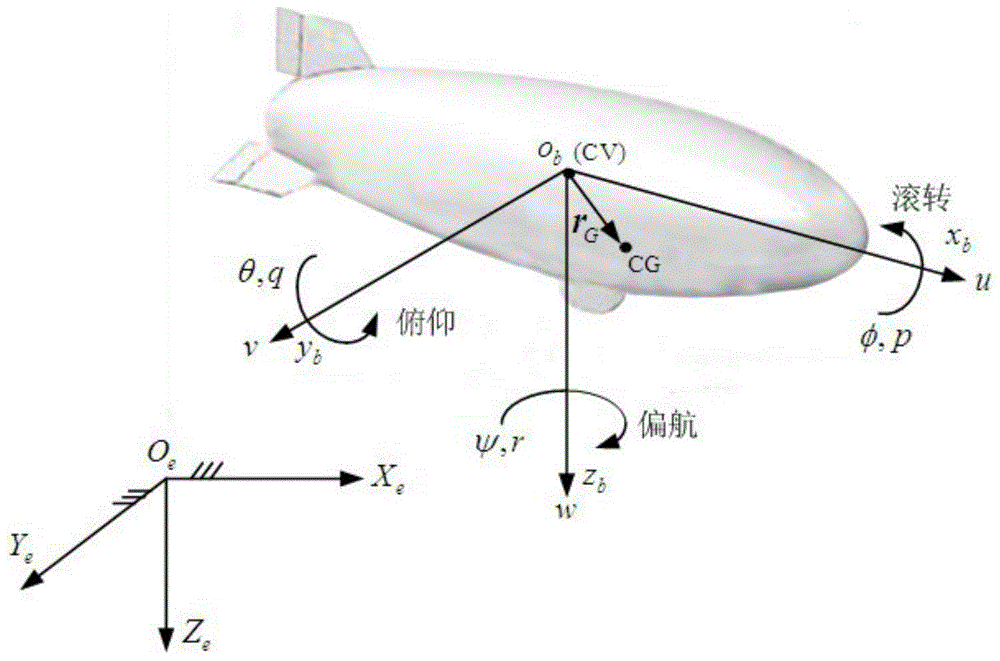
[0098] n d =[x d ,y d ,z d ,θ d ,ψ d ,φ d ] T =[(1.5t)m,200sin(0.005t)m,10m,0rad,0.02rad,0rad] T , x d 、y d ,z d , θ d 、ψ d and φ d They are command x coordinate, command y coordinate, command z coordinate, command pitch angle, command yaw angle and command roll angle;
[0099] Step 2: Calculate the amount of error
[0100] Calculate the amount of error between the commanded track and the actual track:
[0101] e=η-η d =[x-x d ,y-y d ,z-z d ,θ-θ d ,ψ-ψ d ,φ-φ d ] T ,
[0102] where, η=[x,y,z,θ,ψ,φ] T is the actual track, x, y, z, θ, ψ, φ are the x coordinate, y coordinate, z coordinate, pitch angle, yaw angle and roll angle of the actual track respectively, which are co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More