

An endoscope simulation training system with soft force feedback
A technology of simulation training and endoscopy, which is applied in the direction of educational appliances, instruments, teaching models, etc., can solve the problems that the handle movement process cannot be monitored in the whole process, the handle image jumps, and affects the training effect, etc., and achieves a simple and reasonable structure and a real simulation process ,Easy to carry and transport
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
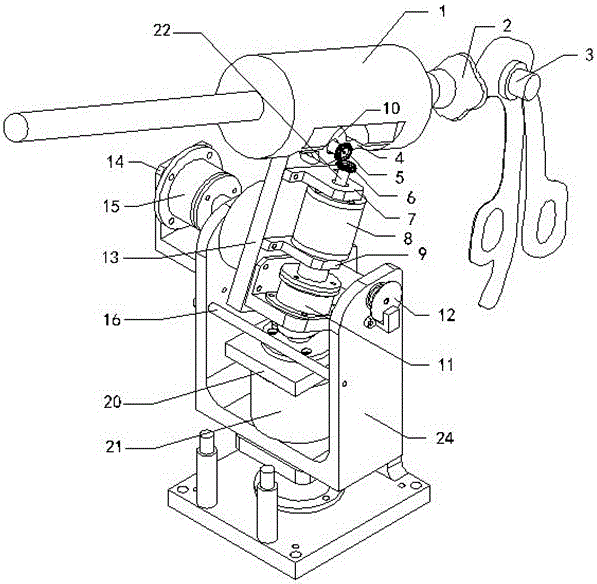
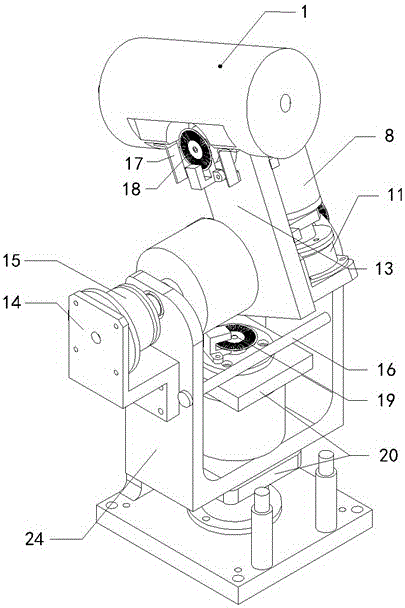
[0023] see figure 1 , 2 , as shown in the figure, an endoscope simulation training system with soft force feedback, the system includes:
[0024] A three-dimensional rotating operation table, the three-dimensional rotating operation table is composed of a vertical rotating bracket and a horizontal rotating bracket, wherein the horizontal rotating bracket includes a base, a cylindrical platform 21 and two splints 20, and the middle of the base A vertical shaft is provided, and the cylindrical platform 21 is provided with a central hole, and a bearing is provided in the hole. The cylindrical platform 21 is sleeved on the vertical shaft, and the upper end of the vertical shaft passes through the central hole of the cylindrical platform 21, and Connect with the horizontal direction circular grating rotary encoder 19 fixed on the upper end surface of the cylindrical table 21;
[0025]Described vertical rotation bracket comprises a surgical instrument fixed plate 13 and U-shaped s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More