

Crawling robot control system capable of controlling robot through Bluetooth mobile phone
A crawling robot and control system technology, applied in the control system, motor generator control, program control manipulator, etc., can solve the problems of high cost, poor versatility, complex technology, etc., and achieve good stability, portability, and anti-interference ability strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
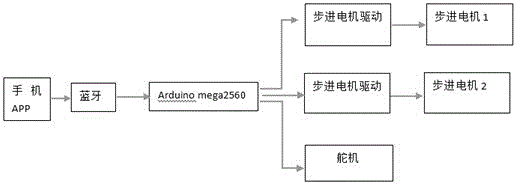
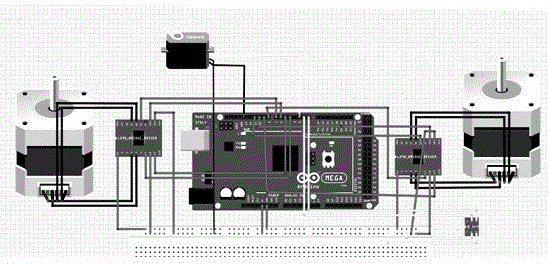
[0023] The present invention is characterized by three main hardware modules in the wireless bluetooth crawling robot control system: an L298N module, an XM15-B module, and a steering gear module.
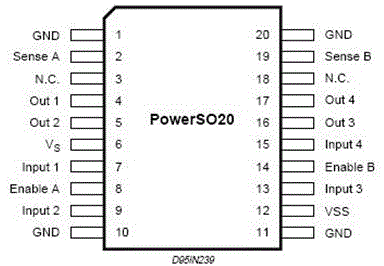
[0024] L298N is a DC motor drive chip, such as image 3 It is the two package diagrams of the L298N chip, we use the PowerSO20 package. The chip features: adjustable speed, strong anti-interference ability, and has the function of freewheeling protection. The chip connection method: pin 1 GND, pin 10 GND, pin 11 GND and pin 20 GND are grounded. Pin 2 SenseA and pin 9 SenseB are not connected. Pin 3 N.C. and Pin 19 N.C. are not connected. The No. 4 pin Out1, the No. 5 pin Out2, the No. 16 pin Out3 and the No. 17 pin Out4 are respectively connected to the four pins of the stepper motor in order. Pin 6 VS is connected to the positive pole of the 12V DC power supply. Pin 7, Input1, Pin 9, Input2, Pin 13, Input3, and Pin 15, Input4 are respectively connected to pins 4, 5, 6, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More