

Energy-storage type leapfrog-simulation robot
A robot, energy storage technology, applied in the field of jumping robots, can solve the problems of not being able to play their respective advantages, slow speed of servo motors, high spring power density, etc., to optimize the leg structure, improve the degree of bionics, and the effect of strong jumping explosive force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
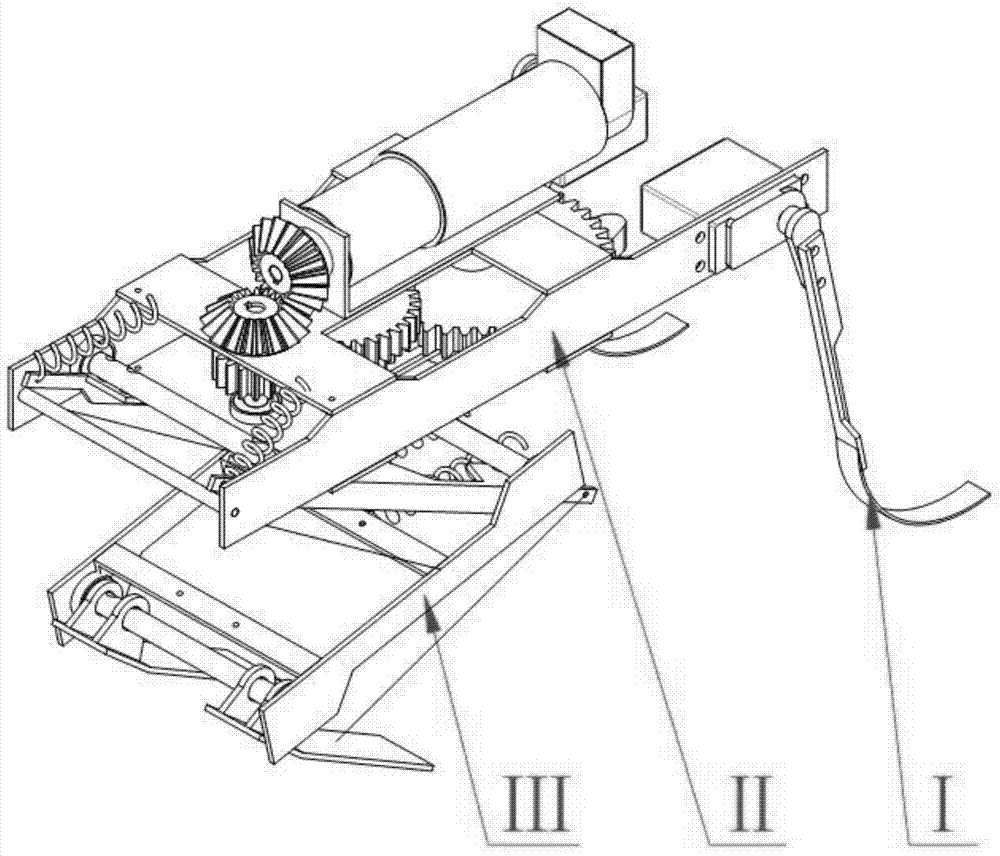
[0025] combine Figure 1~5 , the entire energy-storage frog-like robot is mainly composed of three parts: forelimb Ⅰ, torso Ⅱ, and hindlimb Ⅲ; the entire robot specifically includes:
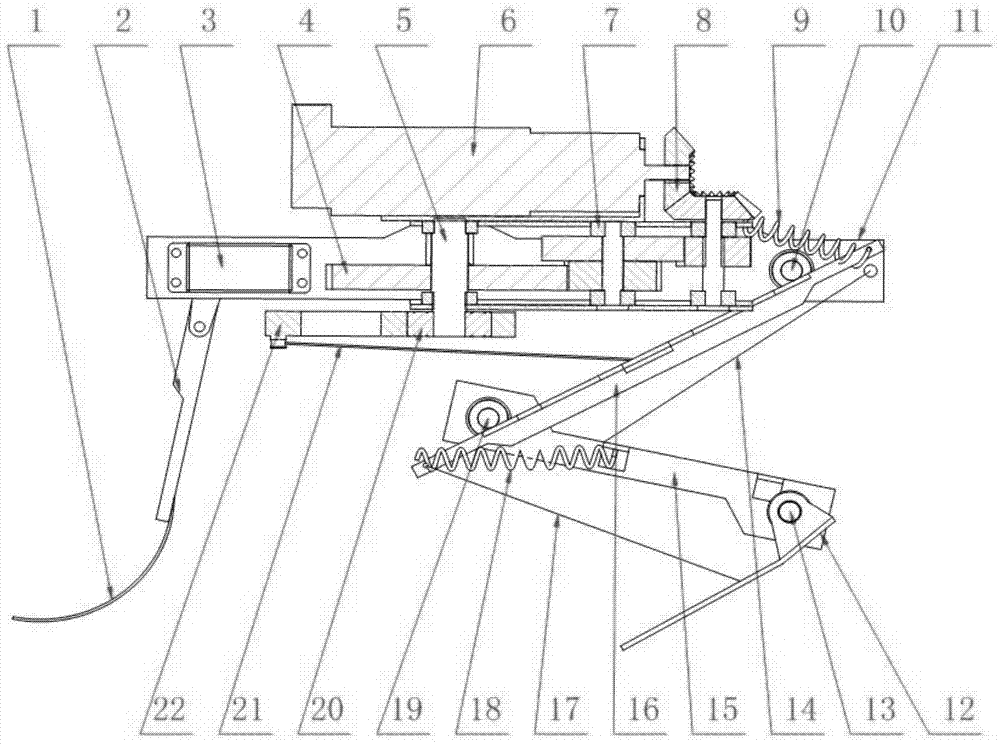
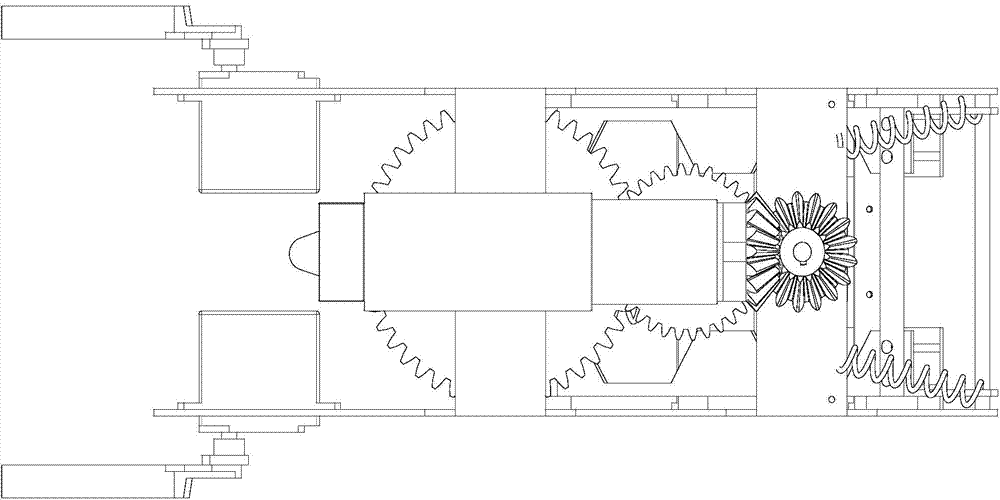
[0026] C-shaped flexible forefoot 1, forelimb thigh 2, steering gear 3, secondary gear reducer 4, crank shaft 5, servo motor 6, deep groove ball bearing 7, bevel gear 8, hip joint energy storage spring 9, hip joint shaft 10. Trunk structure aluminum plate 11, hind limb sole 12, ankle joint axis 13, calf linkage cable 14, hind limb calf 15, hind limb thigh 16, sole linkage cable 17, knee joint energy storage spring 18, knee joint axis 19, one-way Bearing 20, hindlimb driving cable 21, rotary crank 22.
[0027] The assembly relationship of the entire energy-storage frog-like robot is as follows: the entire torso II is a frame composed of aluminum plates connected by screws; the serv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More