Mobile platform outdoor positioning method based on multi-sensor fusion
A multi-sensor fusion, mobile platform technology, applied in satellite radio beacon positioning systems, instruments, measuring devices, etc. Accurate positioning requirements and other issues, to achieve the effect of easy promotion, high positioning accuracy and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
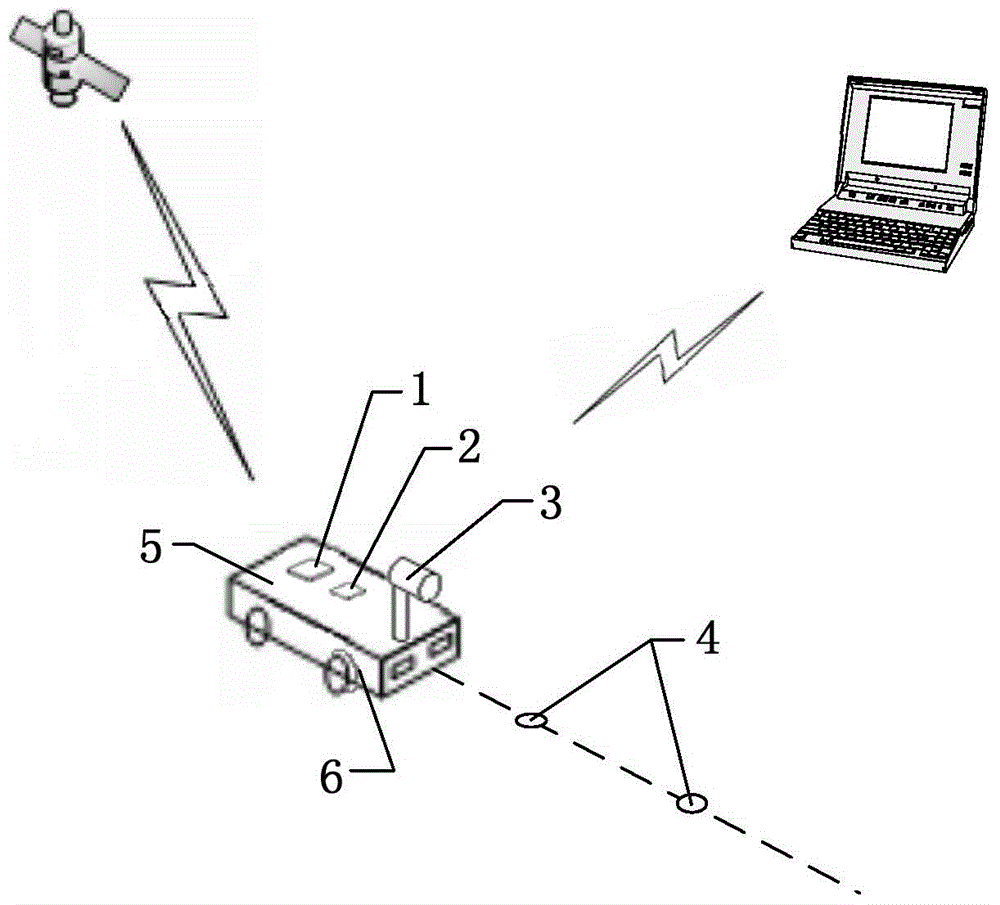
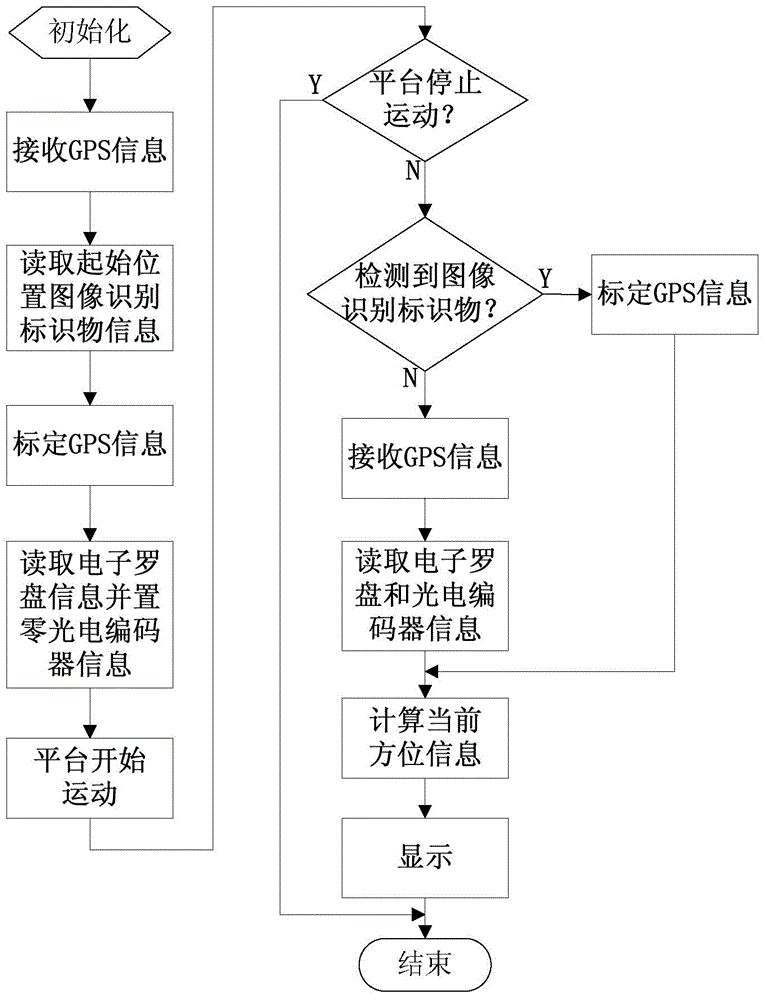
[0034] Embodiment 1: The following takes the outdoor intelligent inspection robot of a digital community as an example to specifically illustrate the outdoor high-precision positioning method of a mobile platform based on multi-sensor fusion in the present invention. The intelligent inspection robot is mainly a robot that replaces the security guard and automatically completes the security inspection in the digital intelligent community. In this embodiment, the positioning system uses the power source carried by the inspection robot itself to switch power to each module through the power module. The outdoor high-precision positioning of mobile platforms based on multi-sensor fusion can be achieved through the following five steps:
[0035] (1) Arrangement of image recognition markers: evenly place markers on the inspection path of the intelligent inspection robot (the corners can be properly placed densely according to the situation), and store the position information of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com