Robot vision servo control device of binocular three-dimensional video camera and application method of robot vision servo control device
A servo control device and robot vision technology, applied in the field of medical robots, can solve the problems of large amount of calculation in image processing, loss of target, and large field of view, and achieve the effects of improving accuracy, ensuring safety, and reducing surgical risk factors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
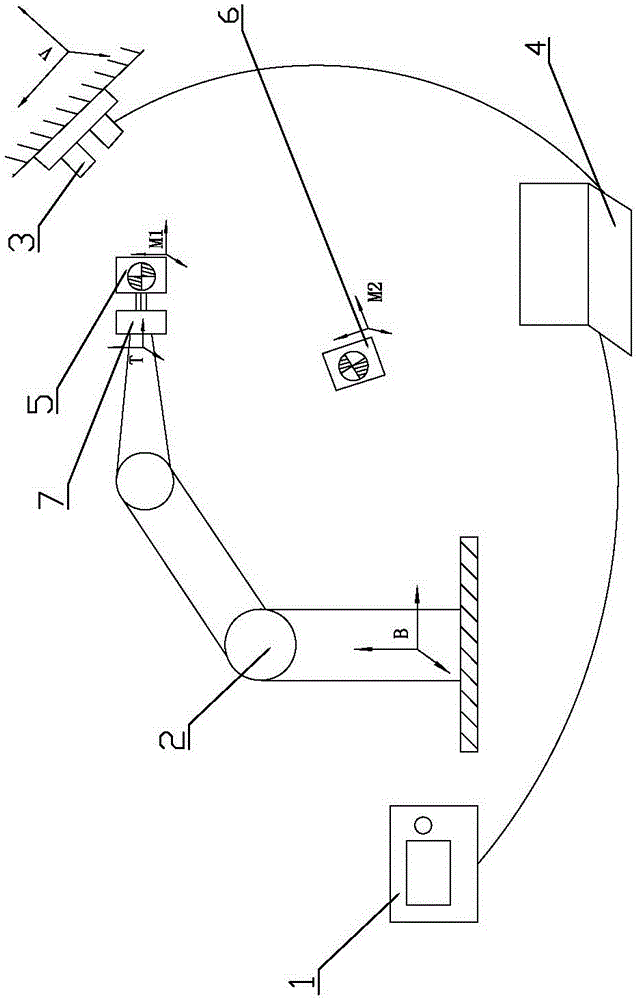
[0029] Embodiment one: as attached figure 1 , 2 As shown, the binocular stereo camera robot vision servo control device includes a robot subsystem and a vision control subsystem, and the robot subsystem includes a robot controller 1 and an articulated six-degree-of-freedom robot 2, and the vision control subsystem The system includes a binocular stereo camera 3 and a vision controller 4; the output end of the robot controller 1 is electrically connected to the input end of the articulated six-degree-of-freedom robot 2, and the two-way communication connection between the robot controller 1 and the vision controller 4 , the output end of the binocular stereo camera 3 is electrically connected to the input end of the vision controller 4 . In practical applications, the articulated six-degree-of-freedom robot 2 can be a UR5 robot produced by UniversalRobots in Denmark, which has a compact structure, light weight, and high safety; the robot controller 1 is developed based on ...
Embodiment 2
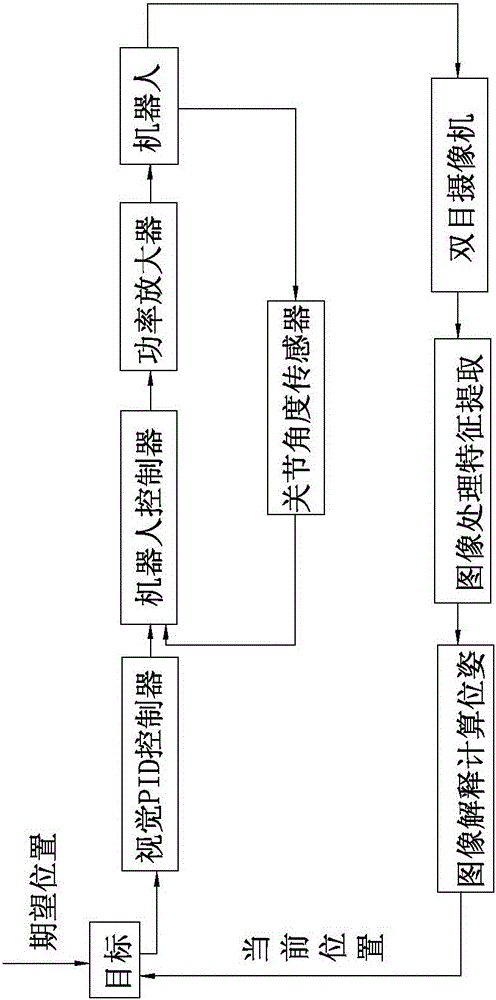
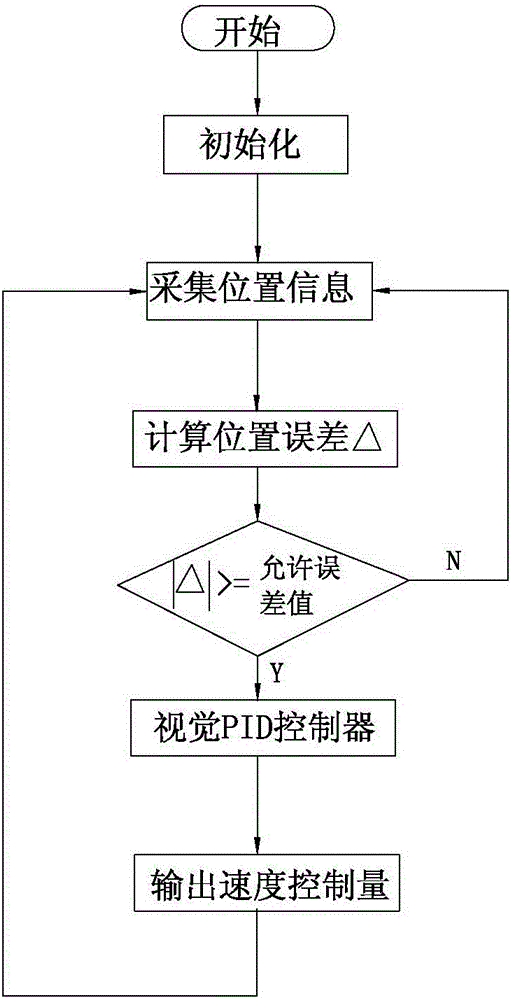
[0034] Embodiment two: if figure 1 , 2 , Shown in 3, a kind of method that uses above-mentioned binocular stereo camera robot visual servo control device, comprises the following steps:
[0035] Step 1: Start the robot subsystem and the vision control subsystem, adjust the position of the binocular stereo camera 3 to ensure that the optical target 5 of the end effector and the optical target 6 of the target moving body are both within the field of view of the binocular stereo camera 3, and then enter Step 2;
[0036] Step 2: Use the binocular stereo camera 3 to collect the position information images of the optical target 5 of the end effector and the optical target 6 of the target moving body in the initialization state, and calculate the position of the optical target 5 of the end effector in the camera coordinate system V according to the camera model homogeneous matrix expression The homogeneous matrix expression of the pose and orientation of the optical tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More