

Five-degree-of-freedom hybrid robot based on 2R1T parallel mechanism
A degree of freedom and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that the parallel mechanism 2UPR/SPR does not have two continuous rotation axes, does not have two continuous rotation axes, and increases the difficulty of trajectory planning. Achieve the effect of simple structure, convenient real-time control, and avoid processing errors and assembly errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
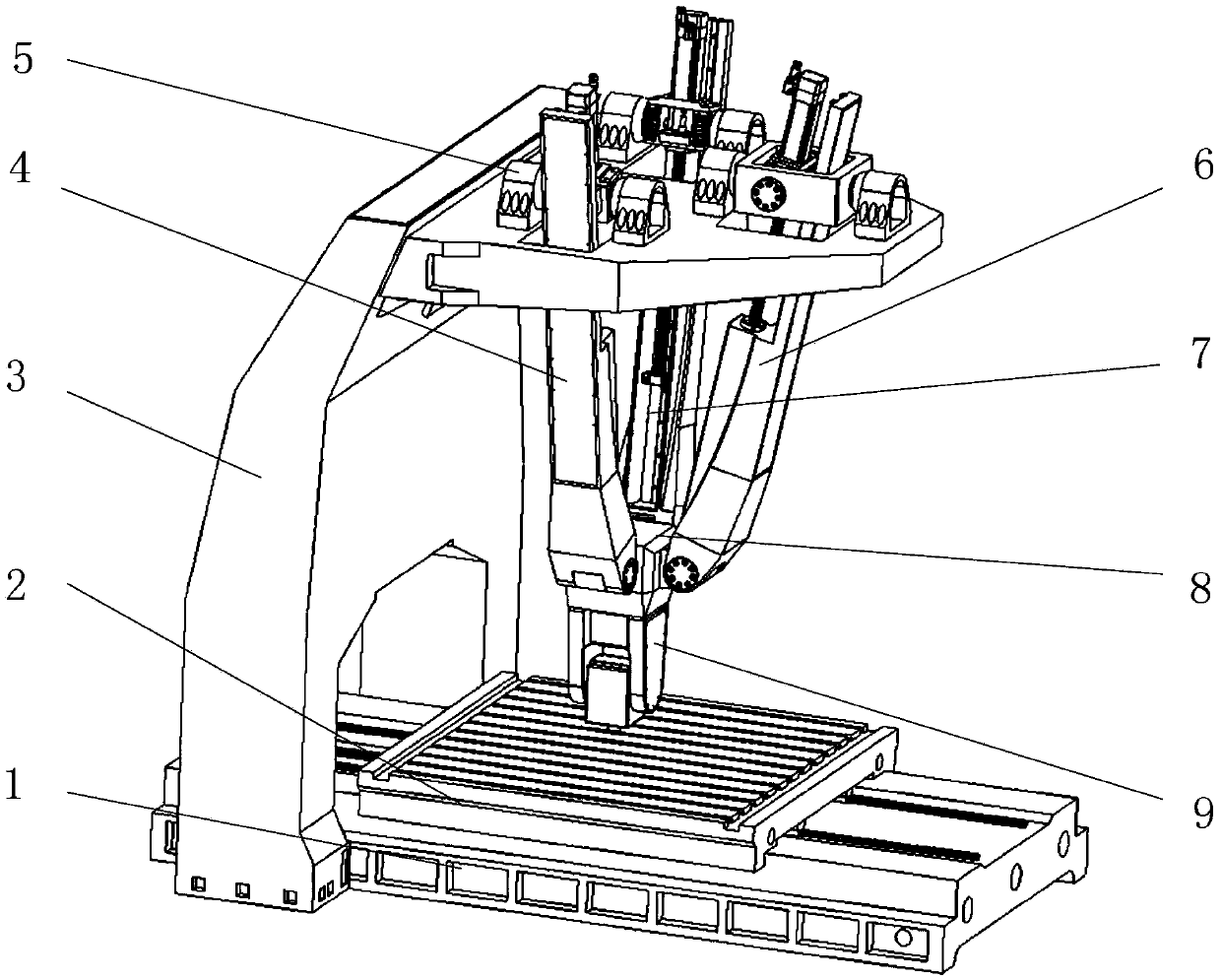
[0023] exist figure 1 In the schematic diagram of the five-degree-of-freedom hybrid robot based on the 2R1T parallel mechanism shown, the fixed platform 1 is provided with a mobile platform 2, and an L-shaped stand 3 is provided on the side of the fixed platform. The first branch chain 4, the second branch chain 7, and the third branch chain 6 are arranged between 8, and a single-degree-of-freedom swing head 9 is provided below the moving platform.
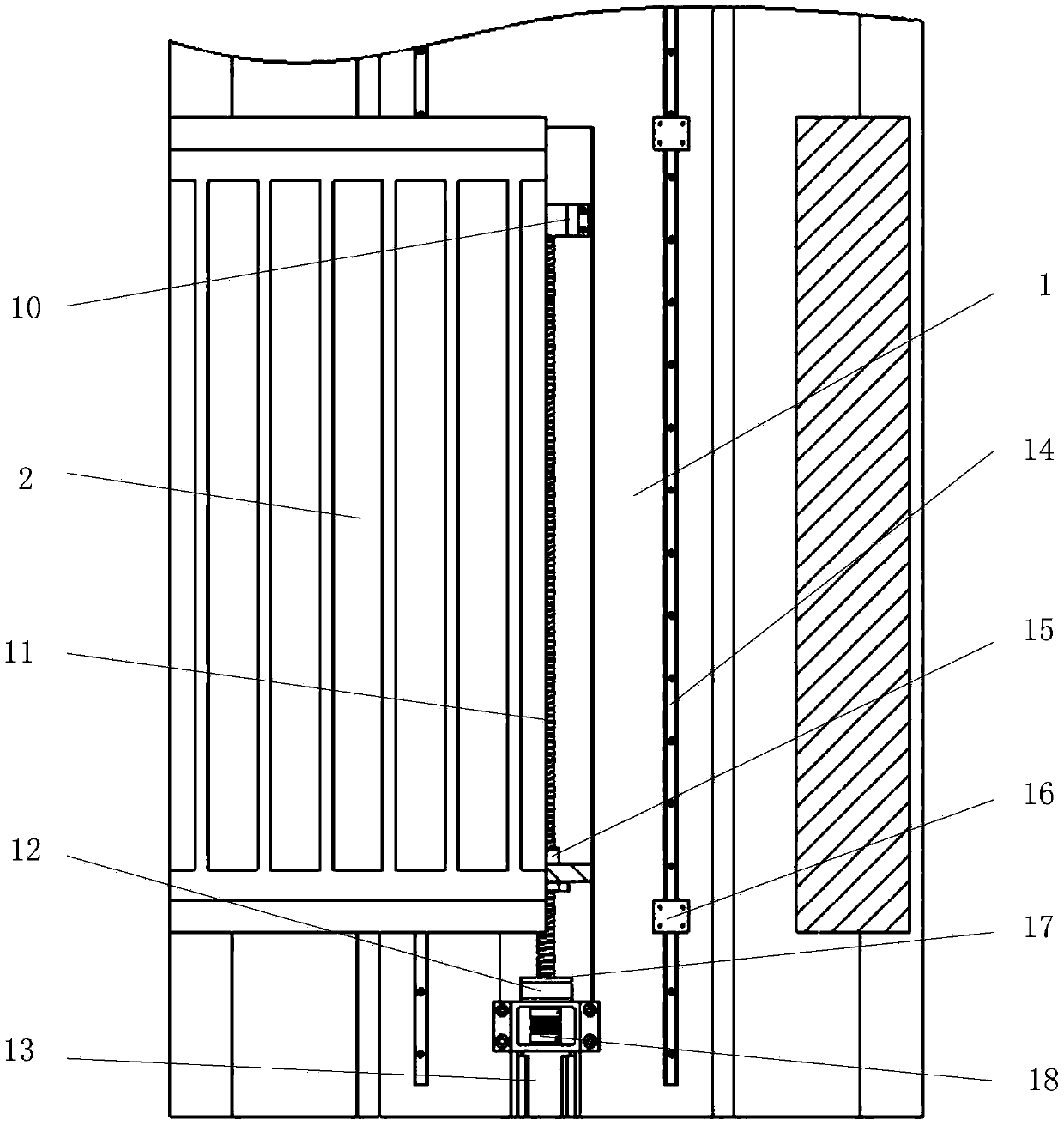
[0024] In the middle of the fixed platform, a mobile platform motor seat 12 is arranged, and the mobile platform motor 13 is fixed on the mobile platform motor seat, and the output end of the mobile platform motor is connected with one end of the mobile platform screw 11 through the mobile platform coupling 18, the This end of the moving platform screw is supported by the upper support 17 of the moving platform screw fixed on the moving platform motor base 12, and the other end of the moving platform screw is supported by the lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More