Plane eight-rod three-activity electro-hydraulic controllable face shovel loading robot
A three-movement, electro-hydraulic technology, used in mechanically driven excavators/dredgers, earthmovers/shovels, construction, etc., can solve the problem of poor stability of the boom lift mechanism, lack of overload protection, and lack of anti-vibration. capacity and other issues, to achieve the effect of improving bearing stability and anti-vibration performance, avoiding deformation and rigid damage, and improving dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
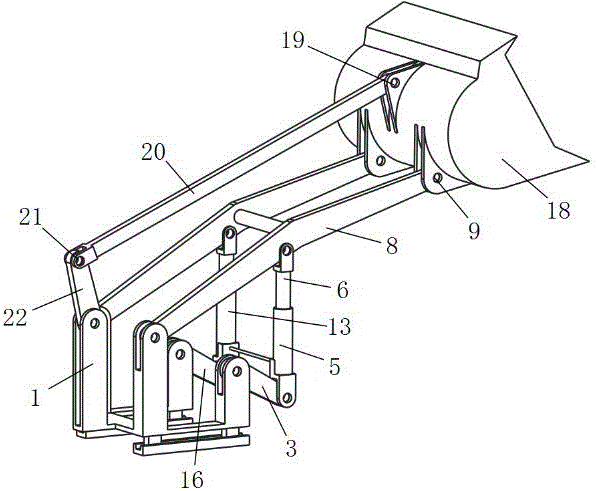
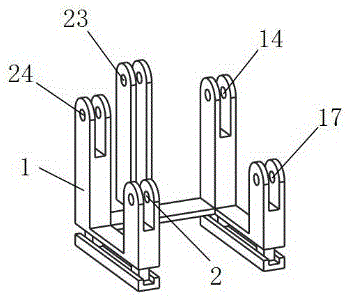
[0021] control figure 1 , a flat eight-rod three-degree-of-motion electro-hydraulic controllable front shovel loading robot according to the present invention includes a boom lifting mechanism, a bucket control mechanism and a frame 1 .
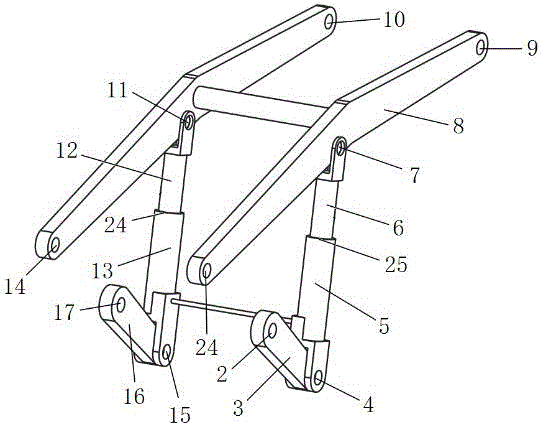
[0022] control figure 1 , figure 2 , image 3 , the boom lifting mechanism includes a boom 8, a first lifting branch chain and a second lifting branch chain, the boom 8 is connected to the frame 1 through a first rotating pair 24 and a second rotating pair 14, and the first rotating pair A lifting branch chain includes a first active rod 3, a first cylinder body 5, and a first piston rod 6. One end of the first active rod 3 is connected to the frame 1 through the third rotating pair 2, and the other end is connected through the fourth rotating pair 4 It is connected with one end of the first cylinde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com