

Robot positioning method based on wireless sensor network and geomagnetic map
A wireless sensor and robot positioning technology, which is applied to instruments, ground navigation, surveying and navigation, etc., can solve the problems of strong data randomness and data loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] In order to make the above-mentioned purposes, features and advantages of the present invention more obvious and understandable, the following comparison Figure 1-5 The robot positioning method based on wireless sensor network and geomagnetic map of the present invention is described in detail:
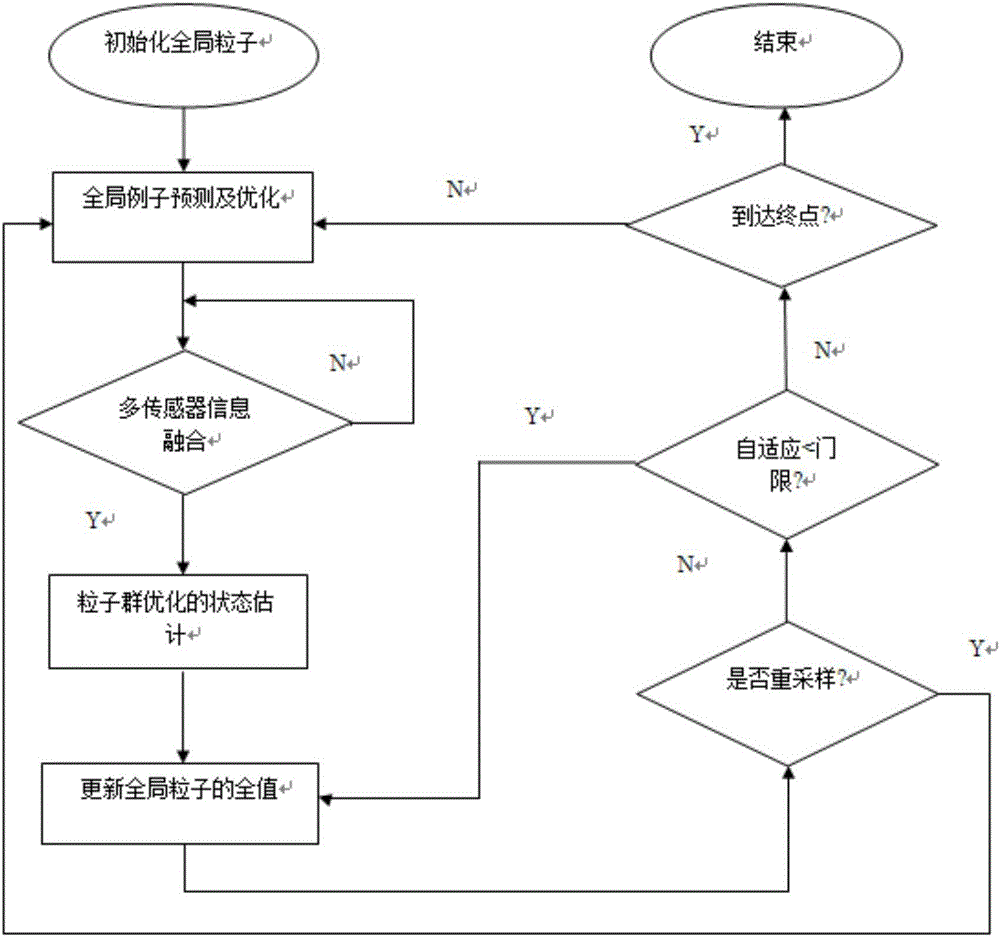
[0067] The overall process of the robot positioning method based on the wireless sensor network and the geomagnetic map implemented according to the present invention is as follows: Figure 5 . It is characterized in that comprising the steps of:
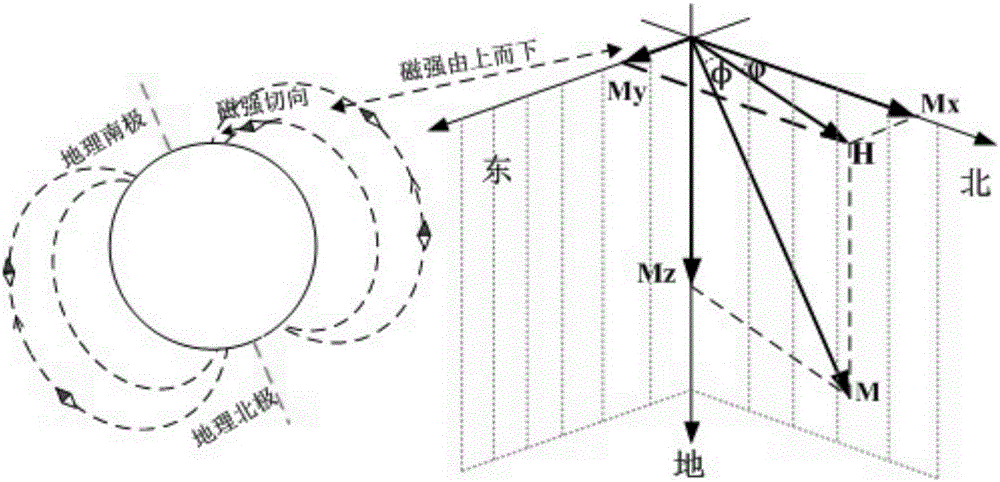
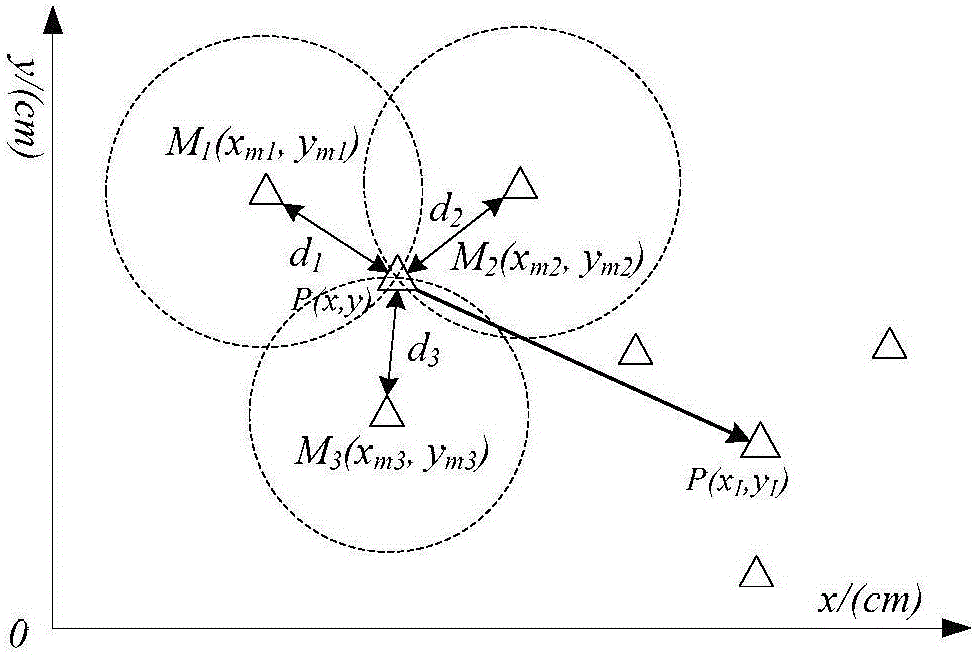
[0068] Step S1: Use the geomagnetic acquisition module MPU6050 to collect geomagnetic data in the indoor area, and save it to the robot SQLserver database, where the interval between the collection points is 1m, which forms a Geomagnetic data is collected at the vertices of the grid, and each point is stored in the database in the form of geomagnetic data + position coordinates to prepare for the geomagnetic matching process when...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More