

Constant-pressure constant-linear-velocity polishing method for robot polishing machine
A constant line speed, robot technology, applied in surface polishing machine tools, grinding machine parts, grinding/polishing equipment, etc. Constant pressure polishing and other problems, to achieve the effect of unique and novel concept, improved processing accuracy and production efficiency, simple and stable mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
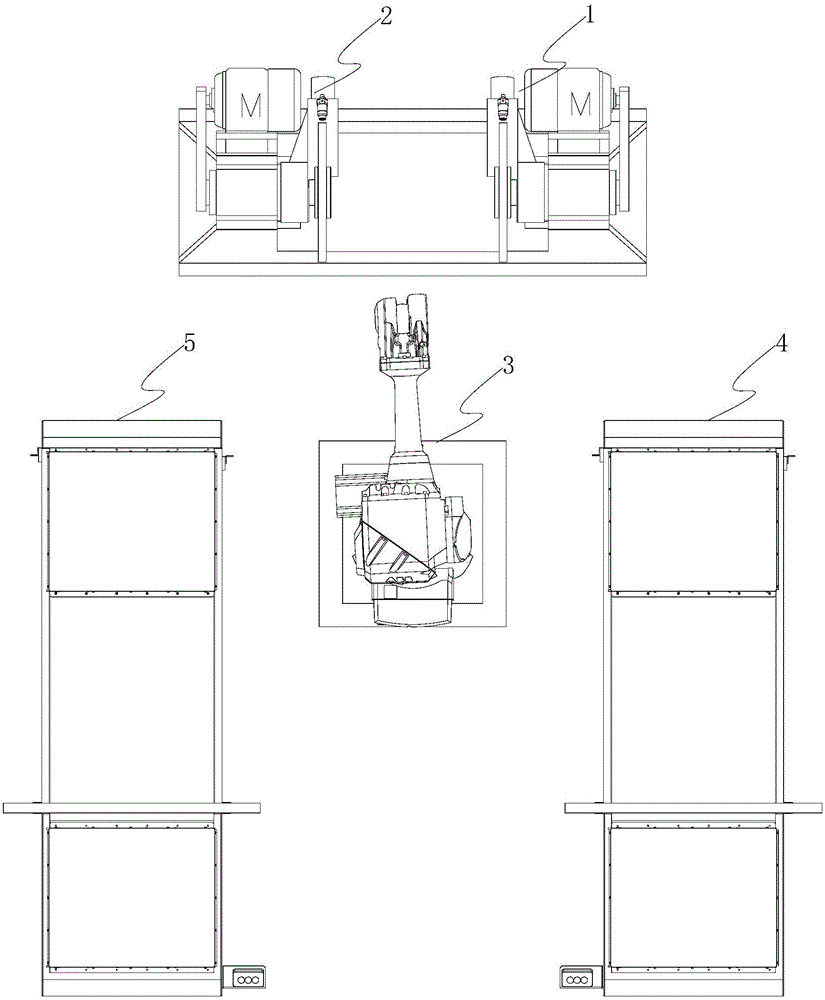
[0026] Such as figure 1 As shown, the robot polishing machine of the present invention includes a double-station hemp wheel polishing assembly 1 and a cloth wheel polishing assembly 2, a robot 3, a robot control system and a PLC control system (not shown in the figure), and the left and right sides of the robot. Two symmetrically arranged automatic feeding devices 4, 5 on the side, wherein the hemp wheel polishing assembly 1 includes a connected hemp wheel, a hemp wheel motor and a hemp wheel frequency converter, and the cloth wheel polishing assembly 2 includes a cloth wheel, a cloth wheel motor and a cloth wheel wheel frequency converter.
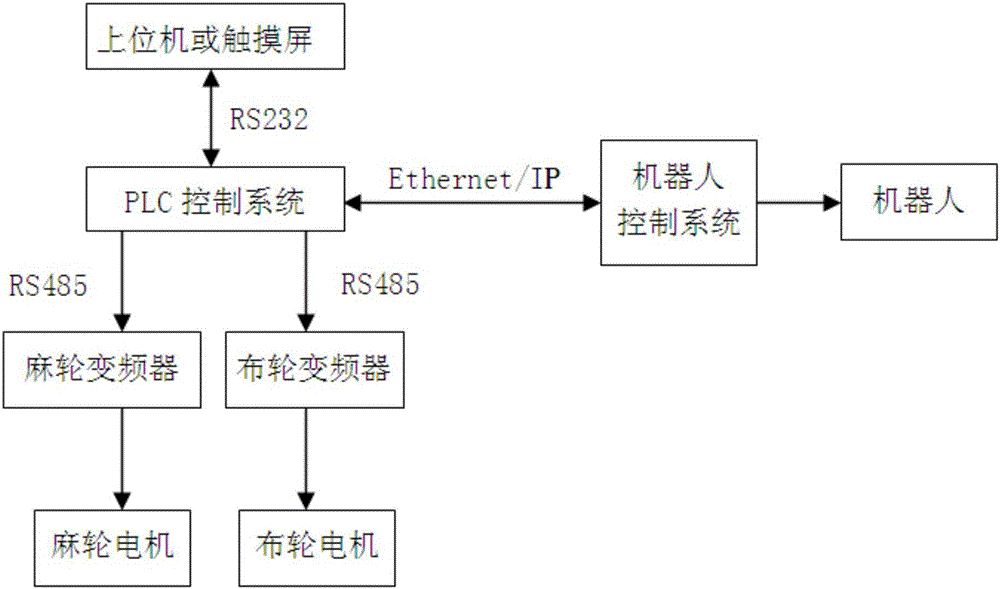
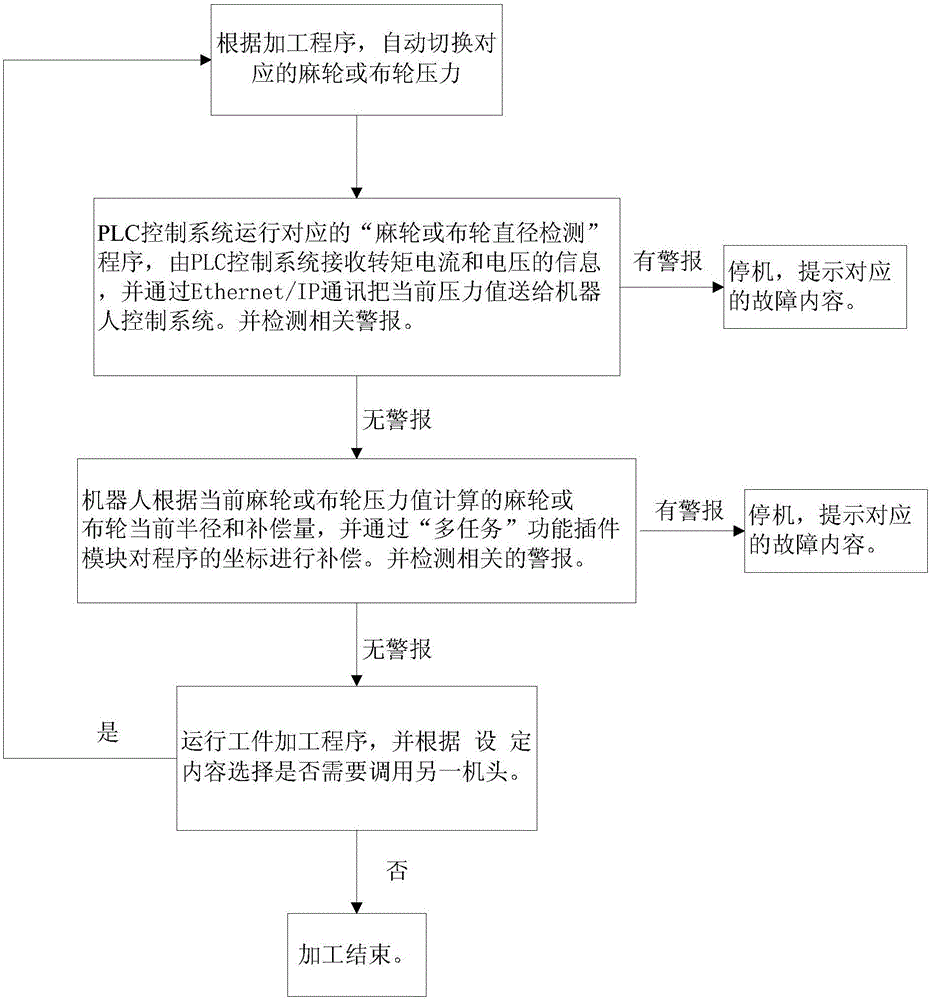
[0027] Such as Figures 2 to 5 As shown, the constant pressure and constant linear velocity polishing method of the robot polishing machine specifically includes the following steps:
[0028] S1. The PLC control system sets the constant polishing force, constant linear speed and robot coordinates of the hemp wheel and the cloth wheel th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More