

Permanent magnet synchronous linear motor sliding-mode control method based on variable exponential reaching law
A permanent magnet synchronous linear and variable index technology, applied in motor generator control, AC motor control, electronic commutation motor control, etc. Weakening chattering, suppressing disturbance, and reducing the effect of overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0145] Embodiment 1: Simulation of sliding mode controller based on variable exponential reaching law
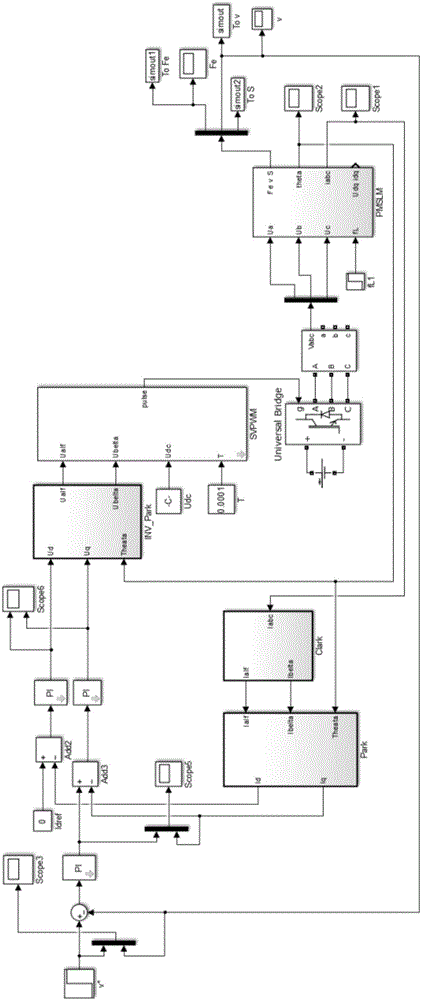
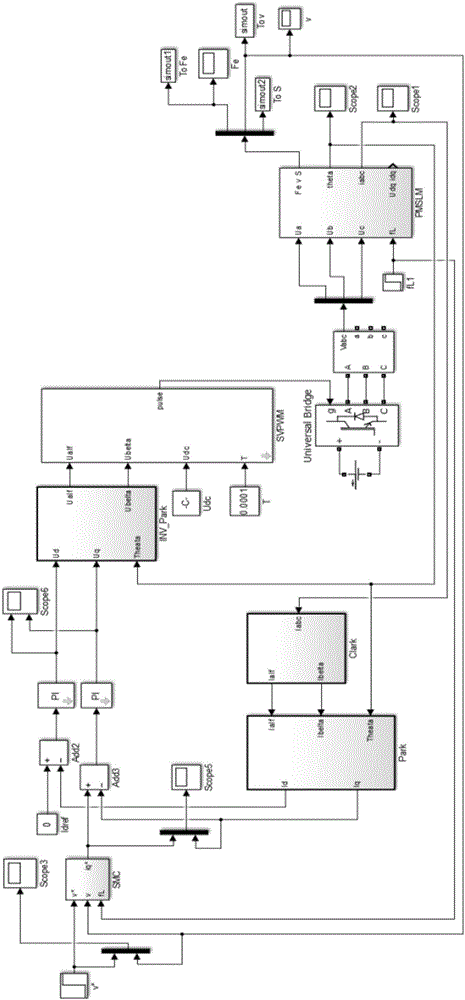
[0146] The simulation model of the variable exponential reaching law sliding mode controller using the integral switching surface is as follows: Figure 9 Shown: The controller parameter is set to: C 0 = 5, C 1 =2, k=40, a=0.01, b=0.5. Other parameters during simulation are the same as above.
[0147] In order to verify the control performance of the control system after adopting the sliding mode controller, set the working state of the load after the load is started at a constant speed and the working state of the acceleration after the constant load is started for simulation, and the output waveforms of the motor when the motor is working under the two operating states are obtained. .
[0148] First, in order to verify the speed tracking performance of the motor, set the running state of the motor: the load is constant at 150N, the initial speed is 0.6m / s, and the give...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More