

Equipment, system and method for flight avoidance of unmanned aerial vehicle
A technology of control equipment and control methods, applied in control/regulation systems, non-electric variable control, three-dimensional position/course control, etc., can solve problems such as the inability to avoid non-"no-fly zone" aircraft, and improve the perception range and perception degree, the effect of avoiding collision accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
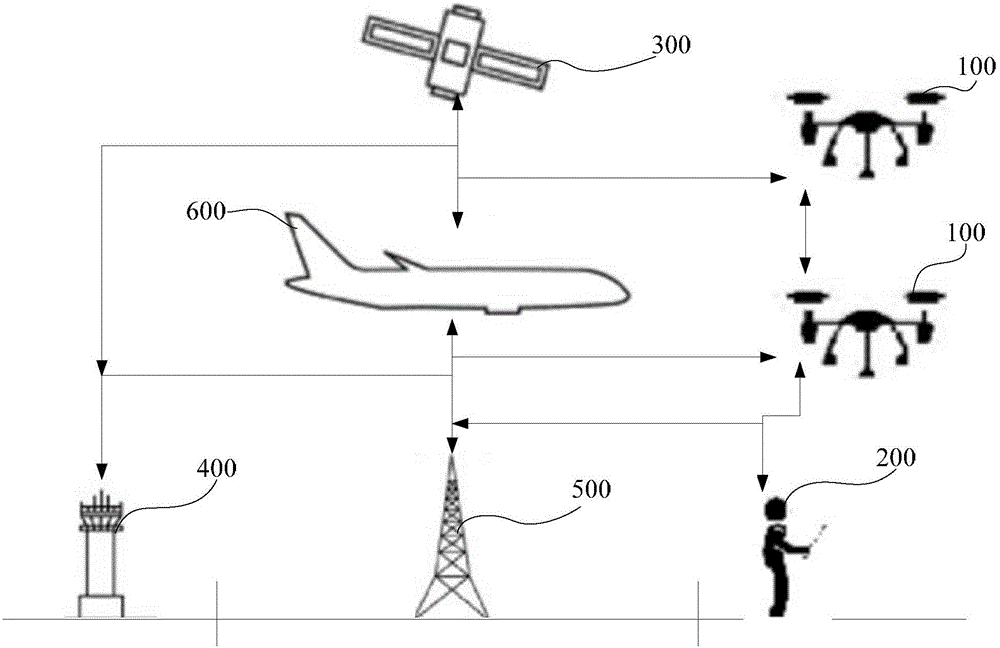
[0042] Such as figure 1 As shown, the present embodiment provides a flight avoidance control system for unmanned aerial vehicles, the control system includes one or more unmanned aerial vehicles 100, a remote controller 200 for controlling the flight of the unmanned aerial vehicles 100, a global satellite positioning device 300, and a ground control system. The station 400 , the ground signal receiving station 500 , and other flying objects (hereinafter also referred to as “surrounding object devices”) 600 in the airspace. Wherein the UAV 100 and other flying objects 600 are respectively provided with a locator (or a positioning instrument), such as a GPS chip or a Beidou navigation system chip; The specific positions of the man-machine 100 and other flying targets 600; the flight avoidance control system of the unmanned aerial vehicle provided by the present embodiment also includes the flight avoidance control equipment of the unmanned aerial vehicle. figure 2 , image 3 ...
Embodiment 2
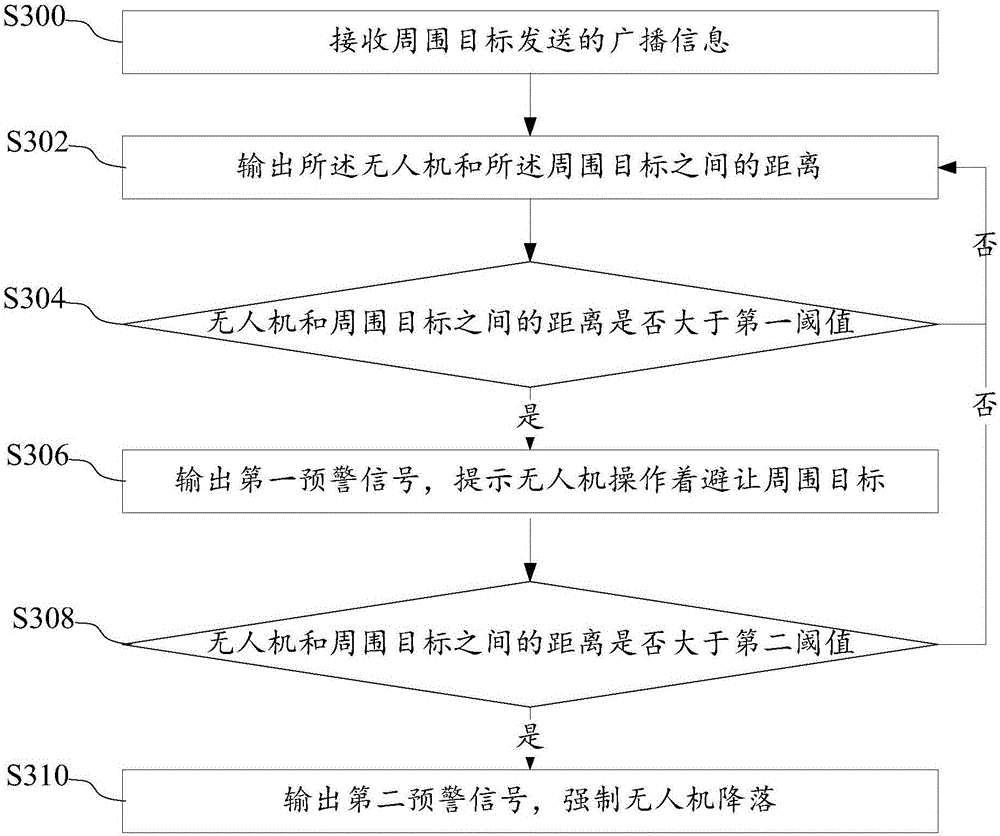
[0059] Based on the first embodiment, this embodiment further explains how the UAV receives broadcast signals from surrounding devices and how to output the distance between the UAV and surrounding target devices in combination with ADS-B technology.
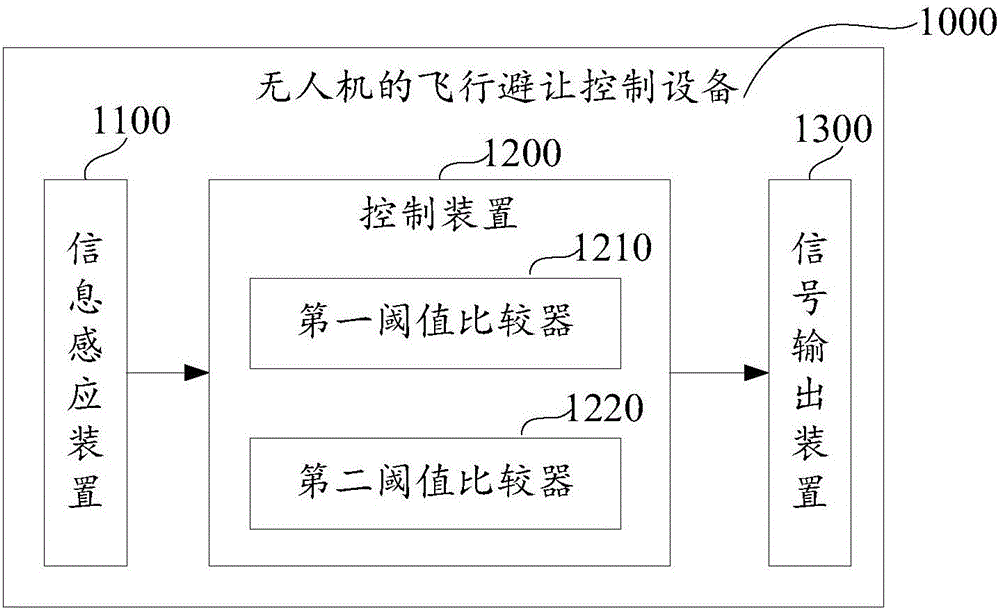
[0060] Preferably, the information sensing device includes an ADS-B receiver and a positioning instrument, and the information sensing device obtains the longitude and latitude signals of the drone based on the longitude and latitude signals of the surrounding target equipment received by the ADS-B receiver and the positioning instrument, and outputs The distance between the UAV and surrounding target equipment, the distance includes the horizontal and vertical separation between the two.
[0061] Preferably, the control device also includes a flight data processor, the flight data processor receives the longitude and latitude signals transmitted by the ADS-B receiver and the positioning instrument respectively; and the flight da...
Embodiment 3
[0103] This embodiment further optimizes the information processing device on the basis of the second embodiment, specifically: the ADS-B receiver 472 and the flight data processor 473 in the information processing device are arranged on ground devices such as ground control stations or remote controllers ;Because the current position of the UAV is to be sent back to the ground remote control terminal in real time, so using the computing power on the ground to complete the data calculation processing between the broadcast signals sensed by the UAV can further reduce the setting in the UAV. The weight of equipment on board and the burden of computing power consumption; of course, based on the consideration of reducing the load, other devices / device parts that can be arranged on the UAV or all of them can be arranged on the ground device, such as ADS-B receiver 472 and One of the flight data processors 473 is provided on the ground unit and the other is provided on the drone.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More