

Six-degree-of-freedom underwater robot
A technology of underwater robots and degrees of freedom, applied in underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of complex structure of active vector thrusters, difficulty in yaw motion control, and inability to realize horizontal plane steering, etc. Achieve the effects of convenient observation of the surrounding environment, enhanced controllability and adaptability, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
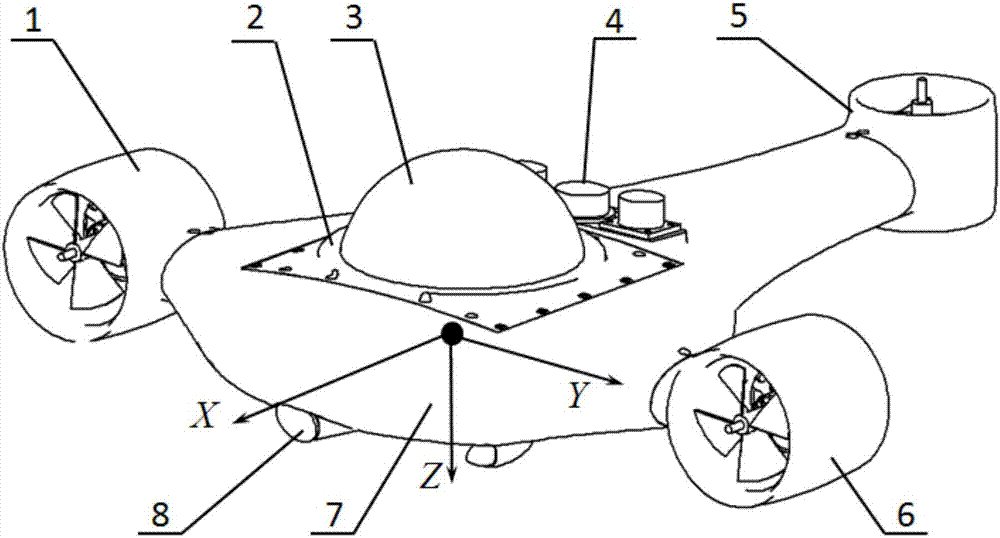
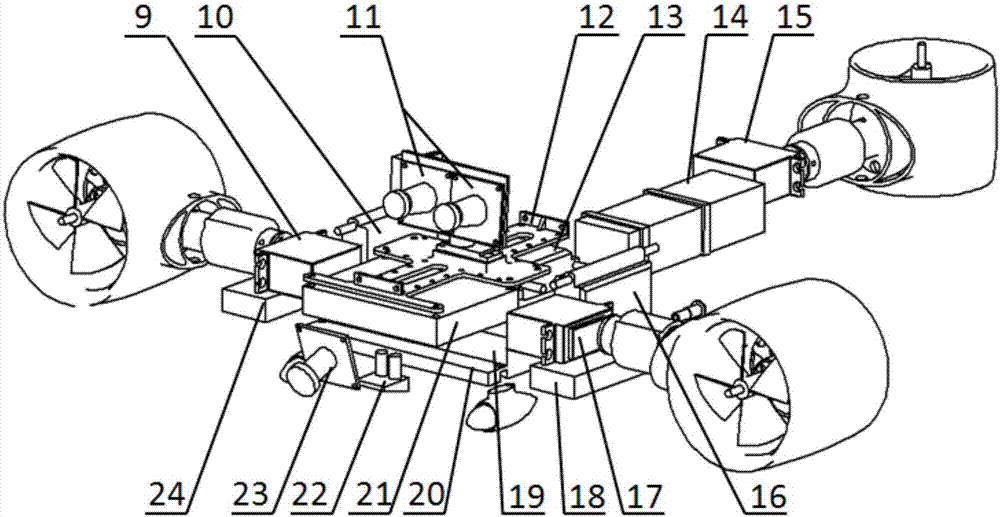
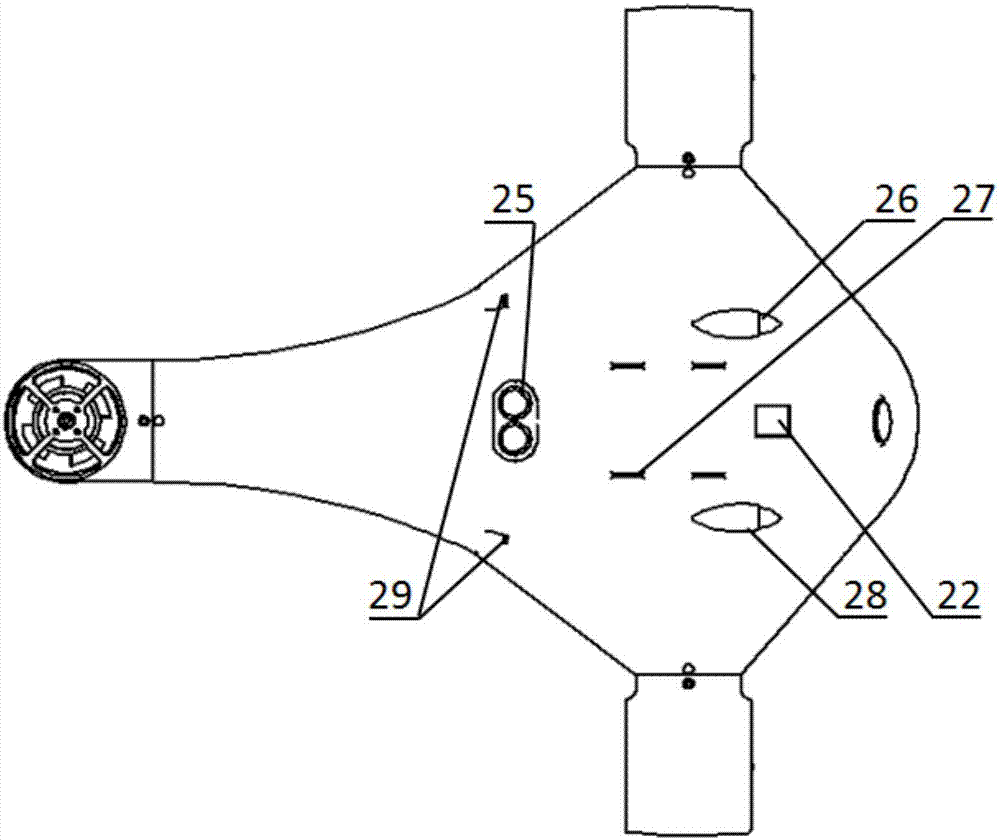
[0034] refer to Figure 1-7 , the present invention consists of a sealed cabin, a power system, a control system, an image acquisition system, an illumination system and a cooling system.
[0035] refer to figure 1 , the sealing cover 2 is connected with the sealing cabin 7 by screws, and a gasket is arranged between the sealing cover 2 and the sealing cabin 7 . The gasket protects the internal components of the sealed cabin 7 on the one hand, and facilitates the assembly and maintenance of the underwater robot of the present invention on the other hand.
[0036] There is a transparent plate 8 at the front portion of the airtight cabin 7, and a transparent cover 3 is arranged on the airtight cover, which is used for installing a camera group insi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More