

PSD range finding-based AGV accurate positioning method
A precise positioning and rough positioning technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of low positioning accuracy of AGV, and achieve the goal of improving layout and modification Flexibility, achieve precise positioning, and ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
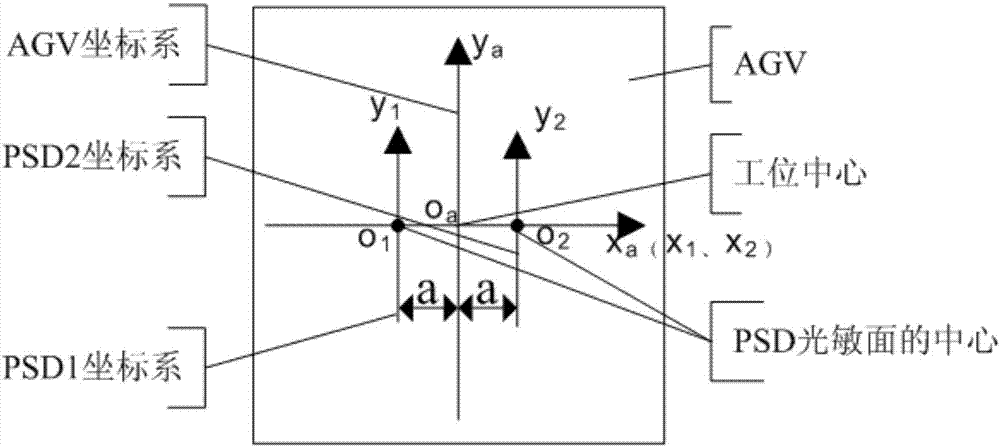
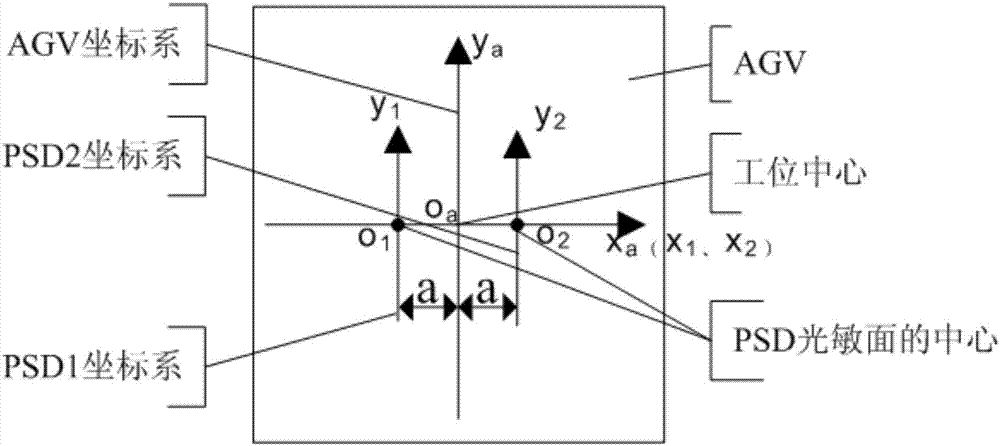
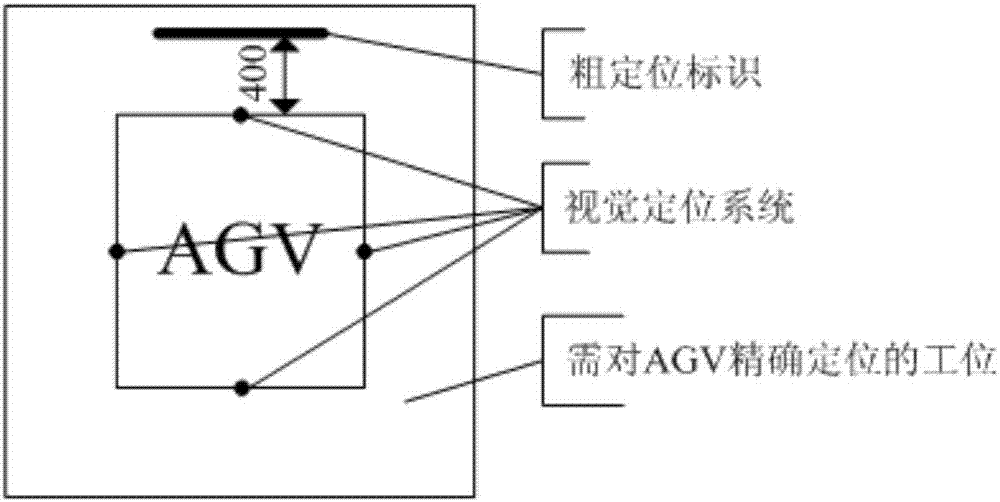
[0050] The basic idea of the present invention is: propose a kind of AGV accurate positioning method based on PSD distance measurement as follows: (1) adopt visual guidance mode, make the positioning accuracy of AGV reach within ± 10mm; PSD ranging, measuring the coordinates of two reference points, so as to determine the current horizontal and vertical offset distance and deflection angle of the AGV according to the straight line equation, and obtain the current pose of the AGV; (3) the current attitude of the AGV and the target attitude are used as input, Establish the motion equation of the AGV, calculate the yaw angle and rotation angle of the AGV; (4) through the omnidirectional movement of the AGV through the mecanum wheel (go straight forward and backward, move left and right laterally, and travel obliquely at any angle, 0 gyration radius in situ rotation and the combination of the above movements) to realize the attitude adjustment of the AGV; (5) During the attitude ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More