Hybrid-driven underwater glider
An underwater glider, hybrid drive technology, applied in the directions of underwater ships, engine components, underwater operation equipment, etc., can solve the problem of emergency drive and remote control of gliders without considering long-range requirements, energy supply, and energy acquisition. , Without taking into account the energy supply and emergency braking and steering, etc., to achieve the effect of realizing energy utilization, maximizing, and satisfying long-range and large-scale marine resource detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
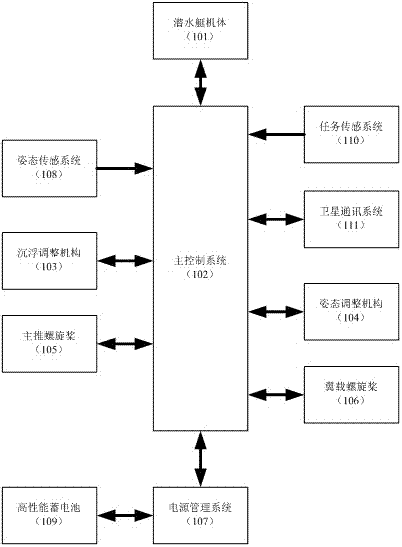
[0028] Such as figure 1As shown, the hybrid drive underwater glider includes: a submarine body (101), a main control system (102), a sinking adjustment mechanism (103), an attitude adjustment mechanism (104), a main thrust propeller (105 ), two wing-mounted propellers (106), a power management system (107), an attitude sensing system (108), a high-performance battery (109), a mission sensing system (110) and a set of satellite positioning The communication system (111), characterized in that: the submarine body (101) is equipped with the sinking and floating adjustment mechanism (103), the attitude adjustment mechanism (104), the main control system (102), the main thrust propeller (105), Two wing-mounted propellers (106), a power management system (107), an attitude sensing system (108), a high-performance battery (109), a mission sensing system (110) and a satellite positioning communication system (111), all The main control system (102) is connected with the power managem...
Embodiment 2
[0034] This embodiment is basically the same as Embodiment 1, especially in that:
[0035] see figure 2 , the submarine body (101) adopts a symmetrical structure of the submarine to cooperate with the main thrust propeller mechanism and the wing-mounted propeller mechanism to realize the protection function of the glider support and the body shell, and various systems (102, 103, 104, 107, 108) are installed and fixed inside. . connected together, the wing-mounted propellers (106) are installed and fixed on the side wings (202), and the mission sensing system (110) is installed at the middle and lower part of the submarine body (101).
Embodiment 3
[0037] This embodiment is basically the same as Embodiment 2, and the special features are:
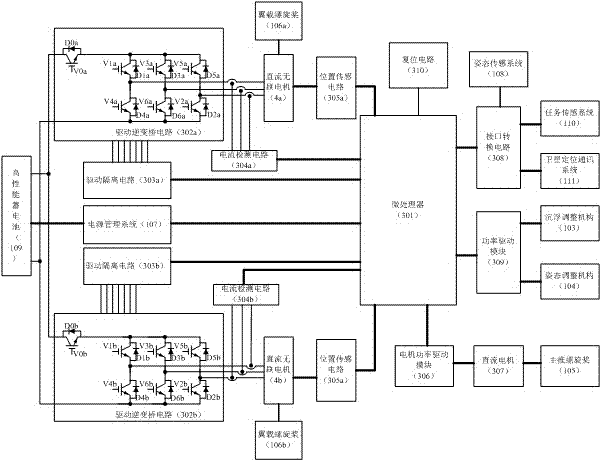
[0038] see image 3 , the structure of the main control system (102): a microprocessor (301) is respectively connected to the left and right drive inverter bridge circuits (302a, 302b) via the left and right drive isolation circuits (303a, 303b), and connected to the left and right two Two current detection circuits (304a, 304b), two left and right brushless DC motors (4a, 4b) are connected through the left and right position sensing circuits (305a, 305b), and the high voltage is connected through the power management system (107). The performance battery (109), the main thrust propeller (105) is connected via the motor power drive module (306), the DC motor (307), the sinking adjustment mechanism (103) and the attitude adjustment mechanism ( 104), connect the reset circuit (310) and the interface conversion circuit (308), the two left and right detection circuits (304a, 304b) and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More