

Heavy-load locomotive slip form extreme value search optimum adhesion control system and method
A heavy-duty locomotive, sticky control technology, applied in the control system, vector control system, motor generator control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
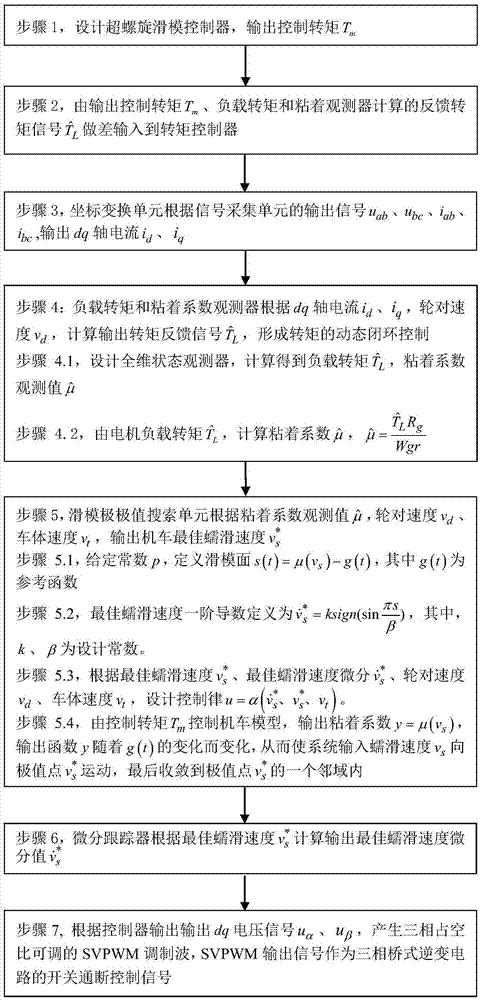
[0039] figure 1 It is a schematic flow chart of the heavy-duty locomotive adhesion control module in Embodiment 1, and the method includes the following steps, including:
[0040] Step 1, design the superhelical sliding mode controller, and output the control torque T m ;
[0041]
[0042] In the formula, J m is the moment of inertia of the motor, R g is the wheel transmission ratio, J is the moment of inertia of the wheel set, F μ is the traction force generated by the traction motor, M is the weight of the heavy-duty locomotive, F d is the running resistance, is the derivative of the best creep velocity estimate, γ 1 , γ 2 is the parameter to be designed for the controller, and σ is the design sliding surface;
[0043] Step 2, the torque T is controlled by the output m , load torque and the feedback torque signal calculated by the sticking observer make differential input to the controller;
[0044] Step 3, the coordinate transformation unit according to the ...
Embodiment 2
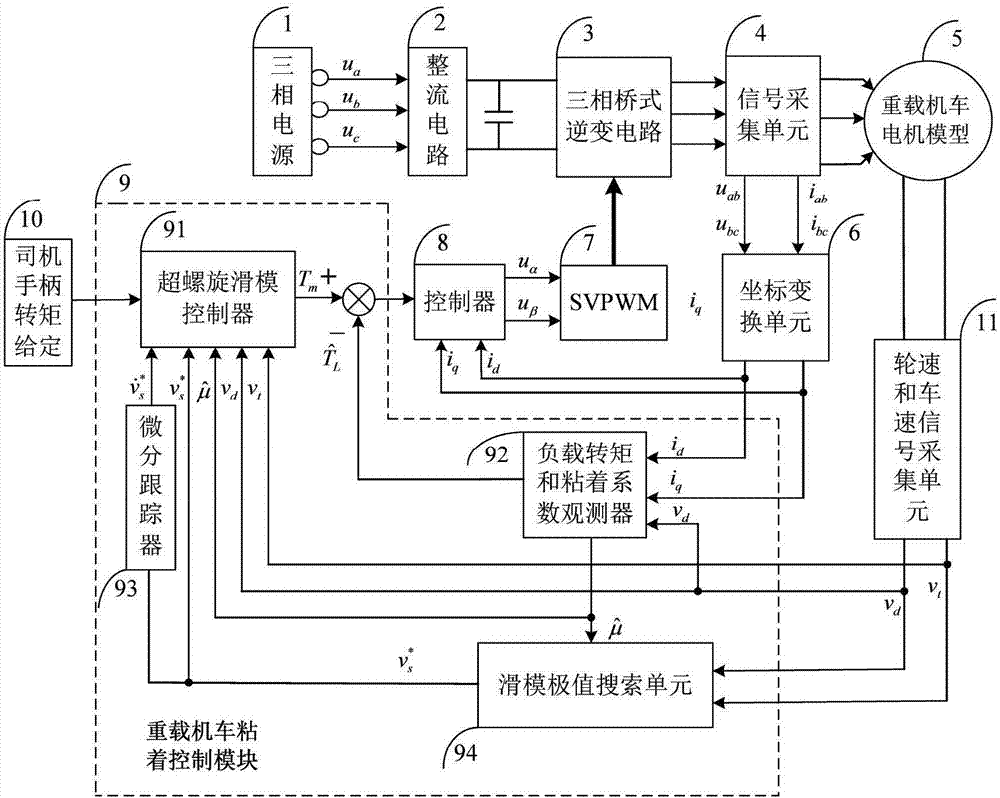
[0060] The heavy-haul locomotive sliding mode extremum search optimal sticking control method in this embodiment is used to implement the heavy-haul locomotive sticking control described above. figure 2 It is a schematic diagram of the overall structure according to Embodiment 2 of the present invention, specifically including: a three-phase power supply 1, a rectifier circuit 2, a three-phase bridge inverter circuit 3, a signal acquisition unit 4, a permanent magnet synchronous motor PMSM5, a coordinate transformation unit 6, a voltage Space vector SVPWM 7, controller 8, heavy-duty locomotive adhesion control module 9, driver handle torque setting 10, wheel speed and vehicle speed signal acquisition unit 11.
[0061] Specifically, the rectification circuit is powered by a three-phase power supply, and the output of the rectification circuit is used as the input of the three-phase bridge inverter circuit. The signal acquisition unit collects the high current and high voltage ...
Embodiment 3
[0063] This embodiment is a supplementary description based on the first and second embodiments.
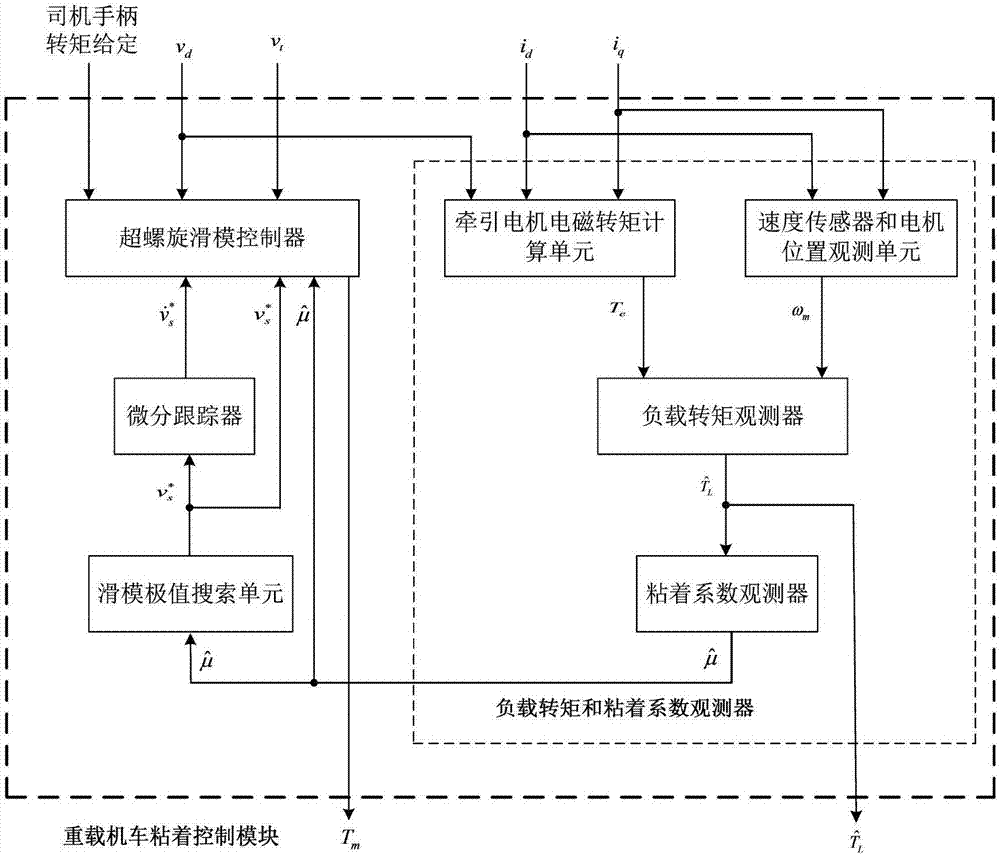
[0064] image 3 It is a diagram of the heavy-duty locomotive adhesion control module in Embodiment 3 of the present invention, and the heavy-duty locomotive adhesion control module includes: load torque and adhesion coefficient observer, super-helical sliding mode controller, and sliding mode extremum search unit.
[0065] Specifically, the load torque and adhesion coefficient observers, according to the dq axis current i d i q signal, input to the traction motor torque calculation unit to calculate the motor electromagnetic torque T e . Speed sensor and motor position observation unit according to dq axis current i d i q signal, the output motor angular velocity ω m . The load torque observer is based on the motor angular velocity ω m and motor electromagnetic torque T e , calculate the load estimated torque Stiction Coefficient Observer Estimates Torque from Load ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More