

Unmanned aerial vehicle-based high-speed train overhead line system automatic patrol inspection method
An automatic inspection and drone technology, applied in the field of electronic information, can solve problems such as remote control signal and airborne circuit interference, high-speed rail catenary threat, drone failure, etc., to avoid the influence of airflow and electromagnetic field interference, reduce Drone failures and crashes, effects of crash avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
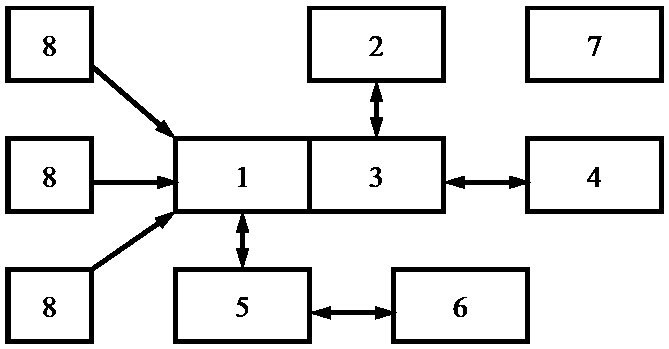
[0029] The present application will be described below in conjunction with the accompanying drawings and embodiments. figure 1 It is an embodiment, and the unmanned aerial vehicle used is a multi-rotor aircraft, including a microprocessor, a flight control system, a navigation system, a power system, a control device, a communication system, and a shooting system; the flight control system includes a flight sensor, a flight controller ; The navigation system includes a positioning module; the shooting system includes a video memory, a video capture device, and a cloud platform; the video capture device is fixed on the cloud platform; the power system includes a battery, a motor, and a rotor; at least three electromagnetic field sensors are used to measure different positions varying electromagnetic field strength, and the electromagnetic field sensor is electrically connected to the microprocessor. The flight sensor continuously checks whether the attitude of the drone is tilt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More