

UAV collaboration SLAM method based on visible light visual communication
A technology for visual communication and unmanned aerial vehicles, applied in the field of unmanned aerial vehicles, can solve the problems of decreased light-dark contrast ratio, optical coordination signal transmission errors, communication failures, etc., to improve the communication rate and response rate, enhance the synergy effect, and ensure confidentiality. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0051] Embodiment: A method for UAV cooperative SLAM based on visible light visual communication.
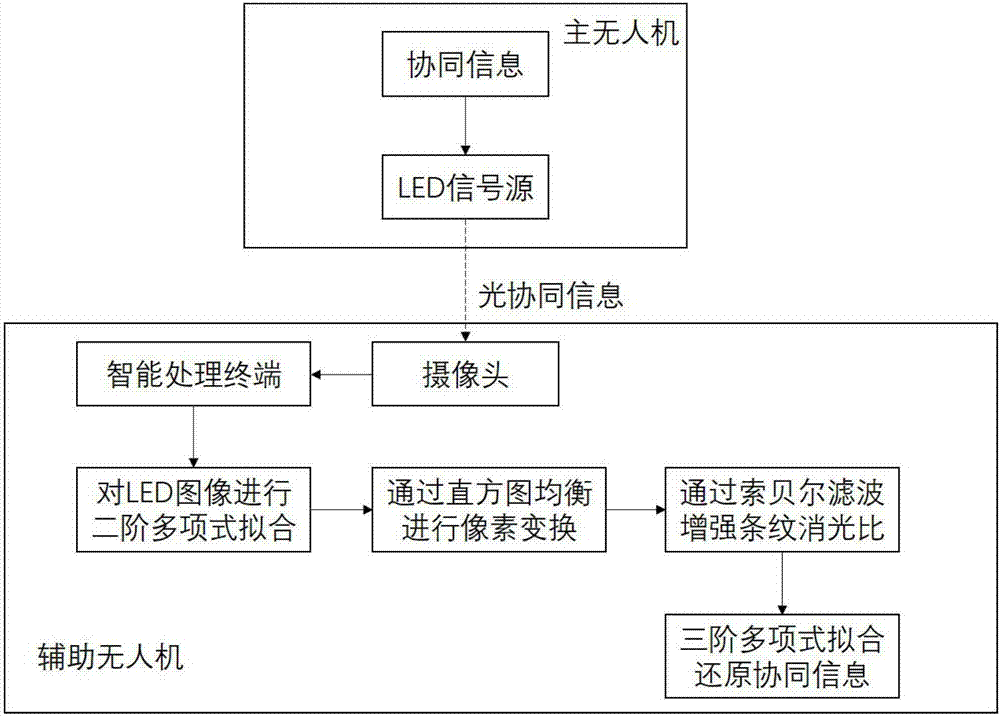
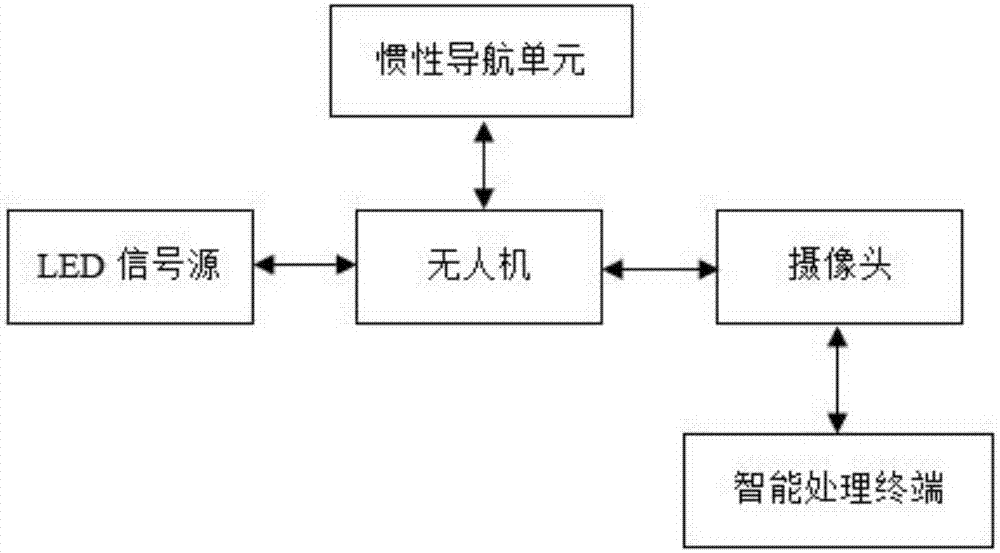
[0052] A method of UAV cooperative SLAM based on visible light communication, such as figure 2 As shown, in this method, one main UAV and four auxiliary UAVs are specifically involved. LED signal sources, CMOS cameras, inertial navigation units and intelligent processing terminals are all installed on the main UAV and the auxiliary UAVs, wherein The inertial navigation unit is used to obtain its own attitude angle, acceleration and other information, and calculate its own position under the earth coordinates; the LED signal source transmits cooperative information through high-frequency flickering; the camera uses the CMOS shutter effect to obtain the cooperative information sent by the LED, and performs Optical communication; the intelligent processing terminal is used to process the image signal received by the camera; and obtain the location information to complete the SLAM ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More