

Dual-motor high-speed and high-precision servo control system and method based on single-chip microcomputer and FPGA
A technology of a servo control system and a control method, applied in the field of mechanical control, can solve the problems of fast running speed and short program cycle running time, and achieve the effect of improving the accuracy of the turntable, avoiding the requirement of large current, high response speed and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
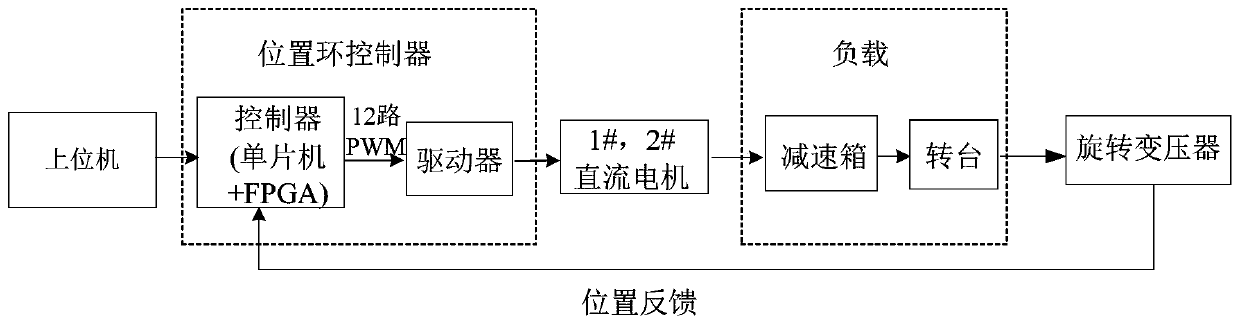
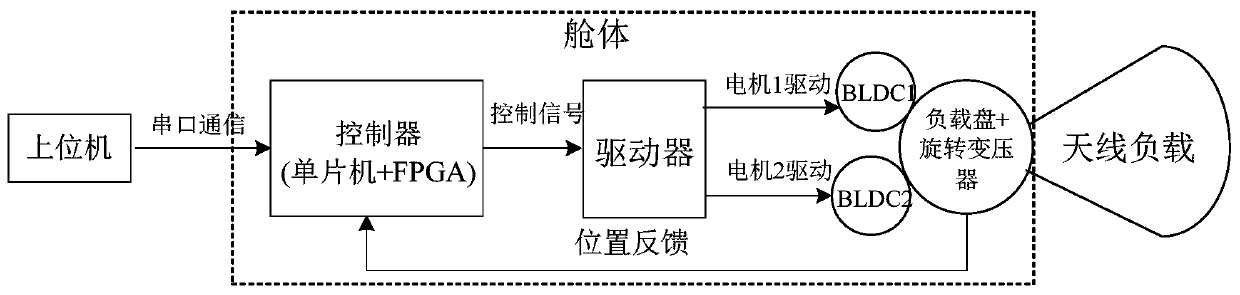
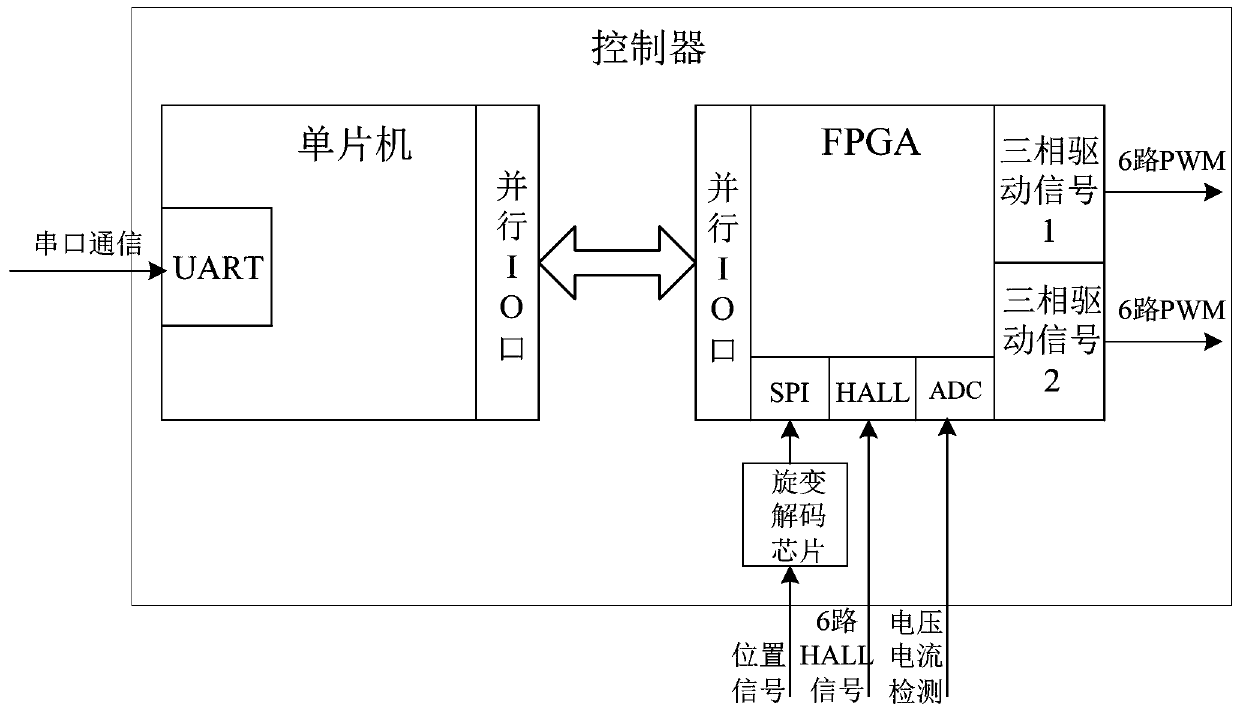
[0036] like figure 1 As shown, the dual-motor high-speed and high-precision servo control system based on a single-chip microcomputer and FPGA includes: a host computer, a position loop controller connected to the host computer, a first motor and a second motor connected to the above-mentioned position loop controller, connected to The load plate of the first motor and the second motor is connected to the load plate and feeds back the position to the resolver of the position loop controller; the position loop controller is composed of: a PID controller composed of a single-chip microcomputer and FPGA control architecture, receiving PID control The 12-way PWM driver issued by the device.
[0037] The servo control system also includes: Hall sensors arranged on the first motor and the second motor and communicating with the position loop c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More