

Pneumatic soft mechanical hand and manufacturing method
A manipulator and manipulator technology, applied in the field of pneumatic software manipulators, can solve the problems of damage to the object to be grasped, limited pressure, low load capacity, etc., to achieve the effect of improving grasping ability, improving applicability, and increasing frictional force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
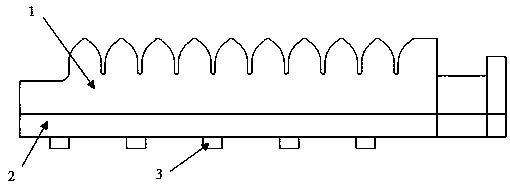
[0035] refer to Figure 1 to Figure 3 The manufacturing method of the soft manipulator in the present invention is further described.
[0036] A method for manufacturing a pneumatic soft manipulator, specifically comprising the following steps:
[0037] Step 1: Mold preparation:
[0038] a. Use photosensitive resin material 3D printing to generate mold: Use 3D modeling software to model the mold and generate STL files, import the STL file into the slicing software for slicing processing, and use SLA light curing molding 3D printing to print the mold.
[0039] b. Spray the release agent on the inner surface of the mold: Spray the release agent evenly on the inner surface of the split mold and let it stand for 15 minutes.
[0040] Step 2: Silica gel mixing and stirring:
[0041] a. Mix the silica gels of A and B components in a ratio of 1:1 (the silica gel is DragonSkin 30 from SMOOTH-ON Company): take the silica gels of A and B components in a ratio of 1:1 40 g, added to a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More