

Differential GPS based tracked autonomous navigation robot and navigation method thereof
An autonomous navigation and robot technology, applied in the field of mobile robots, can solve the problems of electromagnetic interference, track speed deviation on both sides, deviation from the predetermined direction, etc., and achieve the effects of reducing the influence of electromagnetic interference, high communication stability, and accurate positioning and orientation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
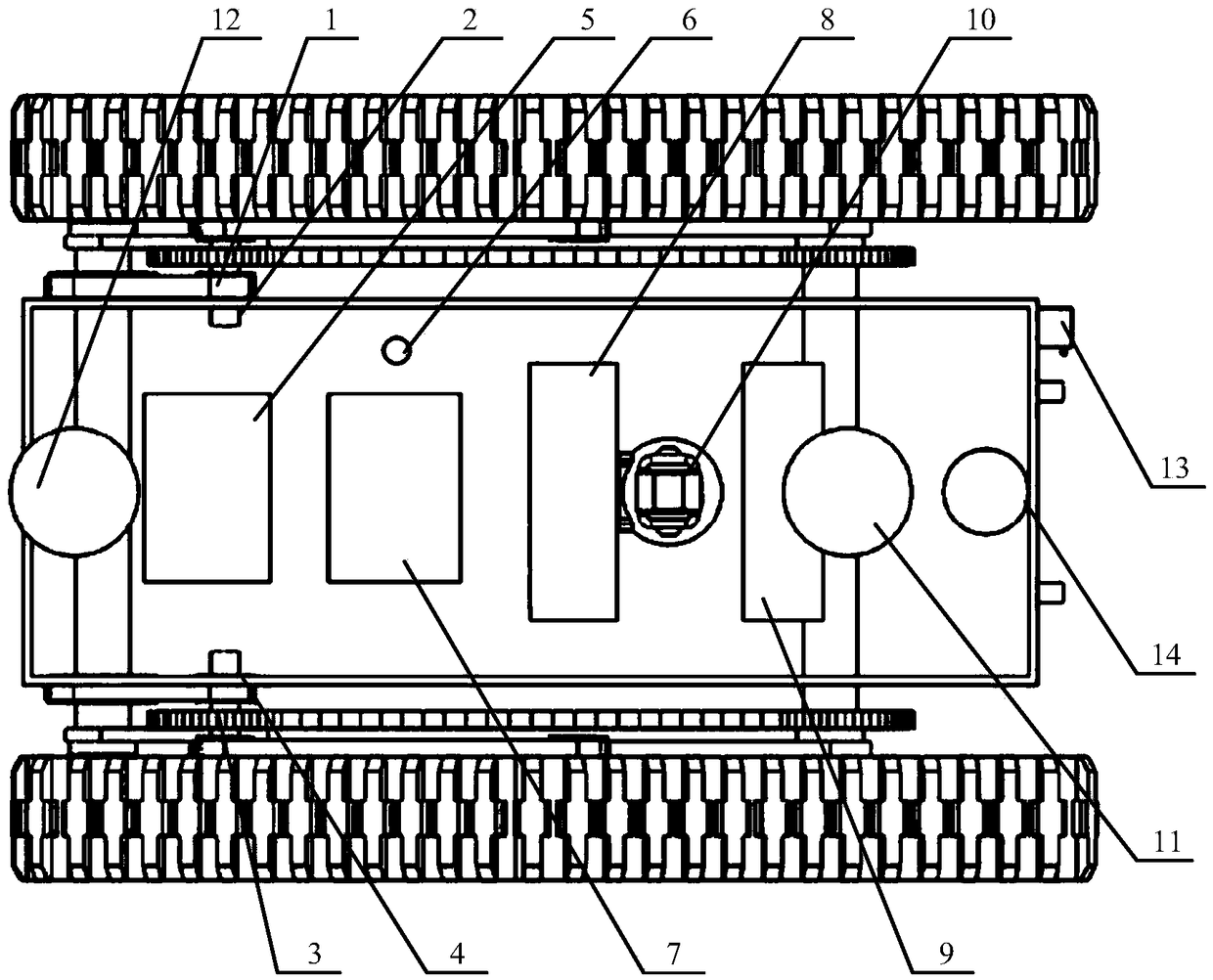
[0057] Such as figure 1 Shown is the crawler autonomous navigation robot based on differential GPS of the present invention, including:
[0058] Left brushless DC motor 1, left rotary encoder 2, right brushless DC motor 3, right rotary encoder 4, dual DC brushless motor driver 5, car antenna 6, car board 7, industrial control computer 8, lithium battery Group 9, web camera 10, front GNSS receiver 11, rear GNSS receiver 12, image and data transmission station 13, 3D lidar 14; compared with traditional brush motors, the DC brushless motor has a commutation process without sparks, Advantages such as long service life. The rotary encoder is a speed displacement sensor integrating opto-electromechanical technology. The principle is that when the rotary encoder shaft drives the grating disc to rotate, the light emitted by the light-emitting element is cut into intermittent light by the grating disc slits, and is received The component receives the initial signal. After the signal is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More