

Industrial robot TCP (Tool Central Point) calibration method based on uniform attitude distribution
An industrial robot, evenly distributed technology, applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems that the degree of attitude difference cannot be optimized, reduce the degree of attitude difference, increase the matrix condition number, etc., to avoid operating time and improve Calibration accuracy, the effect of increasing the degree of difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
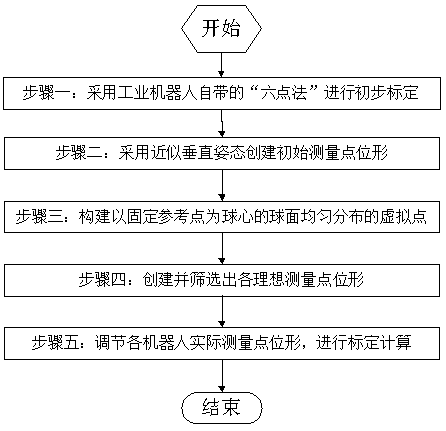
[0093] In order to verify the specific implementation of the present invention, a new STEP SA1800 six-degree-of-freedom industrial robot with a fixed welding torch at the end is used to carry out a TCP calibration experiment. According to the welding torch simulation model provided by the manufacturer, the theoretical TCP is (6.00,-12.00,400.00). according to figure 1 The flow chart of the calibration steps described, the execution steps are as follows:
[0094] Step 1: Set a fixed reference point in the working space at the end of the robot, and use the "six-point method" that comes with the robot teach pendant to calibrate to obtain the initial TCP pose coordinates:
[0095]
[0096] Step 2: Contact the reference point with the end of the welding torch in an approximately vertical posture, set it as the first measurement point configuration, and record the robot’s sixth-axis end flange center pose coordinates:
[0097] P 0 =(877.991,-95.674,876.982),E 0 =(-0.0086,-34.9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More